Berechnung von 3D Daten¶
Während auf Stereo-Pipelines, wie rc_visard, rc_viscore und stereo_ace Disparitätsbilder durch das Matching aus linkem und rechtem Kamerabild berechnet werden, werden 3D Daten auf Pipelines vom Typ zivid, orbbec oder blaze intern in Disparitätsbilder umgerechnet, die dann mit Hilfe eines virtuellen Basisabstands zur Berechnung von Tiefendaten verwendet werden können.
Die folgenden Abschnitte beschreiben, wie Disparitäts-, Fehler- und Konfidenzbilder verwendet werden können, um daraus Tiefendaten und -fehler zu berechnen.
Berechnung von Tiefenbildern und Punktwolken¶
Die folgenden Gleichungen zeigen, wie sich die tatsächlichen 3D-Koordinaten \(P_x, P_y, P_z\) eines Objektpunkts bezogen auf das Kamera-Koordinatensystem aus den Pixelkoordinaten \(p_{x}, p_{y}\) des Disparitätsbilds und dem Disparitätswert \(d\) in Pixeln berechnen lassen:
wobei \(f\) die Brennweite nach der Rektifizierung (in Pixeln) und \(t\) der während der Kalibrierung ermittelte Stereo-Basisabstand (in Metern) ist. Diese Werte werden auch über die GenICam-Schnittstelle zur Verfügung gestellt (siehe Besondere Parameter der GenICam-Schnittstelle des rc_cube).
Bemerkung
Der rc_cube stellt über seine verschiedenen Schnittstellen einen Brennweitenfaktor bereit. Er bezieht sich auf die Bildbreite, um verschiedene Bildauflösungen zu unterstützen. Die Brennweite \(f\) in Pixeln lässt sich leicht bestimmen, indem der Brennweitenfaktor mit der Bildbreite (in Pixeln) multipliziert wird.
Es ist zu beachten, dass für die Gleichungen davon ausgegangen wird, dass das Bildkoordinatensystem im Bildhauptpunkt zentriert ist, der üblicherweise in der Bildmitte liegt, und dass sich \(p_{x}, p_{y}\) auf die Mitte des Pixels bezieht, durch Addieren von 0.5 auf die ganzzahligen Pixelkoordinaten. In der folgenden Abbildung ist die Definition des Bildkoordinatensystems dargestellt.
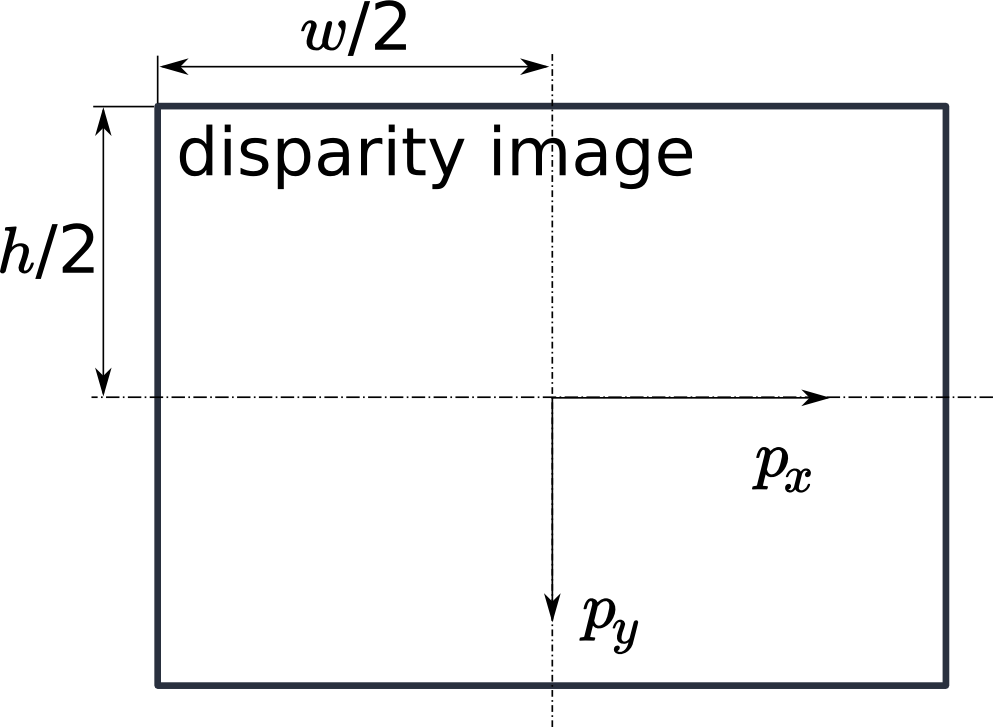
Abb. 11 Bildkoordinatensystem: Der Ursprung des Bildkoordinatensystems befindet sich in der Bildmitte – \(w\) ist die Bildbreite und \(h\) die Bildhöhe.
Die gleichen Formeln, aber mit den entsprechenden GenICam-Parametern, sind in Umwandlung von Bild-Streams angegeben.
Die Gesamtheit aller aus dem Disparitätsbild errechneten Objektpunkte ergibt eine Punktwolke, die für 3D-Modellierungsanwendungen verwendet werden kann. Das Disparitätsbild kann in ein Tiefenbild umgewandelt werden, indem der Disparitätswert jedes Pixels durch den Wert \(P_z\) ersetzt wird.
Bemerkung
Auf der Homepage von Roboception (http://www.roboception.com/download) stehen Software und Beispiele zur Verfügung, um Disparitätsbilder, welche über GigE Vision vom rc_cube empfangen werden, in Tiefenbilder und Punktwolken umzuwandeln.
Konfidenz- und Fehlerbilder¶
Für jedes Disparitätsbild wird zusätzlich ein Fehler- und ein Konfidenzbild zur Verfügung gestellt, um die Unsicherheit jedes einzelnen Disparitätswerts anzugeben. Fehler- und Konfidenzbilder besitzen die gleiche Auflösung und Bildwiederholrate wie das Disparitätsbild. Im Fehlerbild ist der Disparitätsfehler \(d_{eps}\) in Pixeln angegeben. Er bezieht sich auf den Disparitätswert an der gleichen Bildkoordinate im Disparitätsbild. Das Konfidenzbild gibt den entsprechenden Konfidenzwert \(c\) zwischen 0 und 1 an. Die Konfidenz gibt an, wie wahrscheinlich es ist, dass der wahre Disparitätswert innerhalb des Intervalls des dreifachen Fehlers um die gemessene Disparität \(d\) liegt, d.h. \([d-3d_{eps}, d+3d_{eps}]\). So lässt sich das Disparitätsbild mit Fehler- und Konfidenzwerten in Anwendungen einsetzen, für die probabilistische Folgerungen nötig sind. Die Konfidenz- und Fehlerwerte für eine ungültige Disparitätsmessung betragen 0.
Der Disparitätsfehler \(d_{eps}\) (in Pixeln) lässt sich mithilfe der Brennweite \(f\) (in Pixeln), des Basisabstands \(t\) (in Metern) und des Disparitätswerts \(d\) (in Pixeln) desselben Pixels im Disparitätsbild in einen Tiefenfehler \(z_{eps}\) (in Metern) umrechnen:
Durch Kombination der Gleichungen kann der Tiefenfehler zur Tiefe in Bezug gebracht werden: