Pipeline types rc_visard and rc_viscore¶
Parameters¶
The camera module is called rc_camera and is represented by the
Camera page in the desired pipeline in the Web GUI.
The user can change the camera parameters there, or directly via the REST-API
(REST-API interface).
Parameter overview¶
Note
The minimum, maximum and default values in the parameter table
below show the values of the rc_visard. The values will be
different for other camera models and for the rc_viscore pipeline.
This module offers the following run-time parameters:
| Name | Type | Min | Max | Default | Description |
|---|---|---|---|---|---|
acquisition_mode |
string | - | - | Continuous | Acquisition mode: [Continuous, Trigger] |
exp_auto |
bool | false | true | true | Switching between auto and manual exposure (deprecated, please use exp_control instead) |
exp_auto_average_max |
float64 | 0.0 | 1.0 | 0.75 | Maximum average intensity in Auto exposure mode |
exp_auto_average_min |
float64 | 0.0 | 1.0 | 0.25 | Minimum average intensity in Auto exposure mode |
exp_auto_mode |
string | - | - | Normal | Auto-exposure mode: [Normal, Out1High, AdaptiveOut1] |
exp_control |
string | - | - | Auto | Exposure control mode: [Manual, Auto, HDR] |
exp_height |
int32 | 0 | 959 | 0 | Height of auto exposure region. 0 for whole image. |
exp_max |
float64 | 6.6e-05 | 0.018 | 0.018 | Maximum exposure time in seconds in Auto exposure mode |
exp_offset_x |
int32 | 0 | 1279 | 0 | First column of auto exposure region |
exp_offset_y |
int32 | 0 | 959 | 0 | First row of auto exposure region |
exp_value |
float64 | 6.6e-05 | 0.018 | 0.005 | Exposure time in seconds in Manual exposure mode |
exp_width |
int32 | 0 | 1279 | 0 | Width of auto exposure region. 0 for whole image. |
fps |
float64 | 1.0 | 25.0 | 25.0 | Frames per second in Hertz |
gain_value |
float64 | 0.0 | 18.0 | 0.0 | Gain value in decibel if not in Auto exposure mode |
gamma |
float64 | 0.1 | 10.0 | 1.0 | Gamma factor |
trigger_activation |
string | - | - | RisingEdge | Trigger activation: [RisingEdge, FallingEdge, AnyEdge] |
trigger_source |
string | - | - | Software | Trigger source: [Software, In1, In2, In3, In4] |
wb_auto |
bool | false | true | true | Switching white balance on and off (only for color camera) |
wb_ratio_blue |
float64 | 0.125 | 8.0 | 2.4 | Blue balance ratio if wb_auto is false (only for color camera) |
wb_ratio_red |
float64 | 0.125 | 8.0 | 1.2 | Red balance ratio if wb_auto is false (only for color camera) |
These parameters are also available over the GenICam interface with slightly different names and partly with different units or data types (see GigE Vision 2.0/GenICam image interface).
Description of run-time parameters¶
Each run-time parameter is represented by a row on the Web GUI’s Camera page. The name in the Web GUI is given in brackets behind the parameter name and the parameters are listed in the order they appear in the Web GUI.
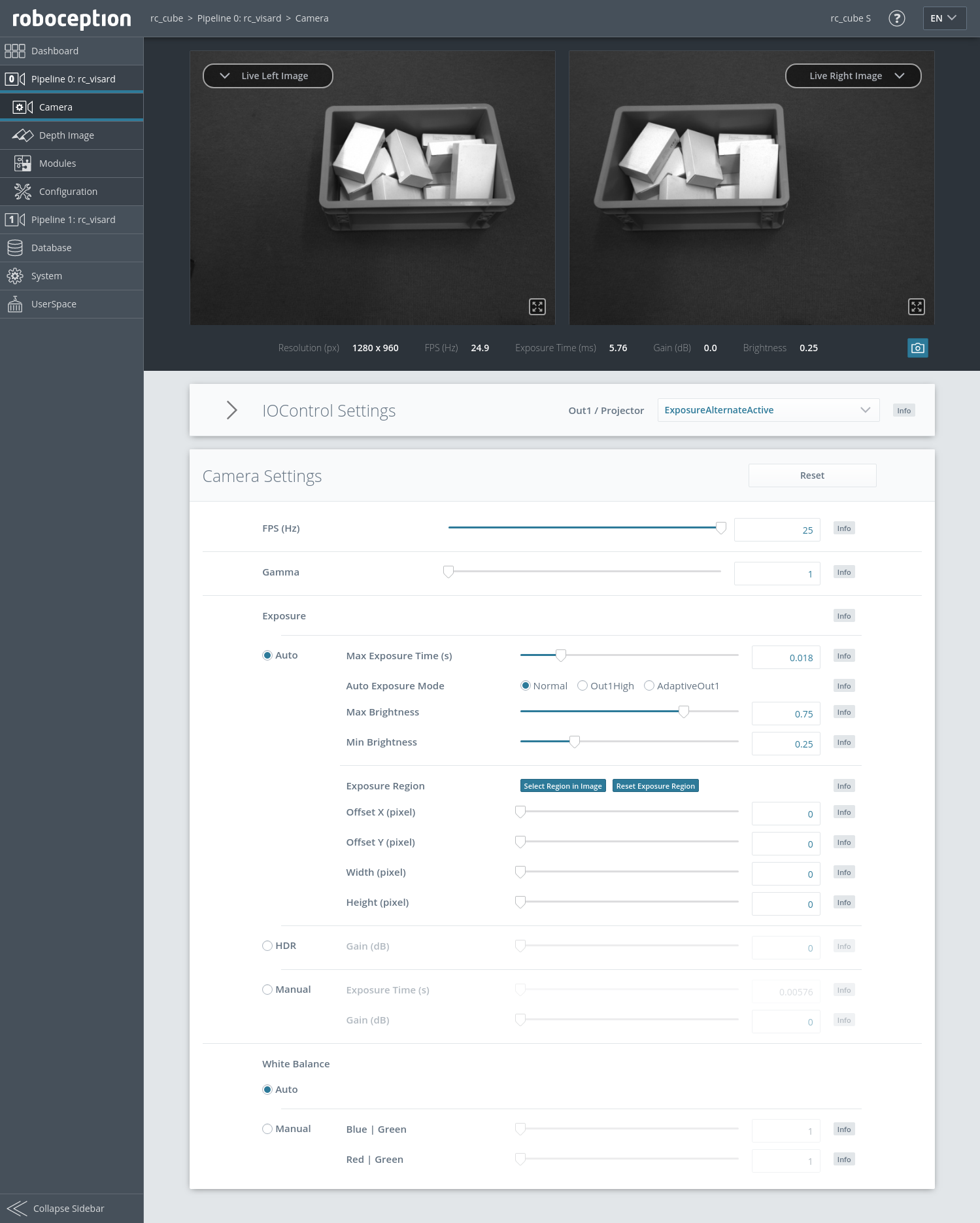
Fig. 9 The Web GUI’s Camera page
acquisition_mode (Acquisition Mode)¶
This values determines the camera acquisition mode. In
Continuousmode, the camera will acquire images at the specified frame ratefps. InTriggermode, images are only acquired when the camera receives a trigger signal.Note
This parameter only has an effect when used in a pipeline with an rc_viscore or rc_visard NG.
Via the REST-API, this parameter can be set as follows.
PUT http://<host>/api/v2/pipelines/0/nodes/rc_camera/services/parameters?acquisition_mode=<value>PUT http://<host>/api/v1/nodes/rc_camera/parameters?acquisition_mode=<value>
trigger_source (Trigger Source)¶
This value is only used when
acquisition_modeis set toTriggerand determines the source for the trigger. InSoftwaremode a trigger can be sent via therc_camera/acquisition_triggerservice. When theacquisition_modefor the depth images is set toSingleFrameorSingleFrameOut1(see Parameters), the camera software trigger is sent automatically whenever a depth image acquisition is triggered. The modesIn1andIn2are hardware trigger modes. An image is acquired whenever a signal on the chosen input is received.Note
This parameter only has an effect when used in a pipeline with an rc_viscore or rc_visard NG.
Via the REST-API, this parameter can be set as follows.
PUT http://<host>/api/v2/pipelines/0/nodes/rc_camera/services/parameters?trigger_source=<value>PUT http://<host>/api/v1/nodes/rc_camera/parameters?trigger_source=<value>
trigger_activation (Trigger Activation)¶
This value is only used when
acquisition_modeis set toTriggerandtrigger_sourceis set toIn1orIn2. It determines the signal edge that should be used to trigger an acquisition. Possible values areRisingEdge,FallingEdgeorAnyEdge.Note
This parameter only has an effect when used in a pipeline with an rc_viscore or rc_visard NG.
Via the REST-API, this parameter can be set as follows.
PUT http://<host>/api/v2/pipelines/0/nodes/rc_camera/services/parameters?trigger_activation=<value>PUT http://<host>/api/v1/nodes/rc_camera/parameters?trigger_activation=<value>
fps (FPS (Hz))¶
This value is the cameras’ frame rate (fps, frames per second), which determines the upper frequency at which depth images can be computed. This is also the frequency at which the rc_cube delivers images via GigE Vision. Reducing this frequency also reduces the network bandwidth required to transmit the images.
Via the REST-API, this parameter can be set as follows.
PUT http://<host>/api/v2/pipelines/<0,1,2,3>/nodes/rc_camera/parameters?fps=<value>PUT http://<host>/api/v1/nodes/rc_camera/parameters?fps=<value>
gamma (Gamma)¶
The gamma value determines the mapping of perceived light to the brightness of a pixel. A gamma value of 1 corresponds to a linear relationship. Lower gamma values let dark image parts appear brighter. A value around 0.5 corresponds to human vision.
Note
For a pipeline of type
rc_visardthis value can only be changed when the connected rc_visard has at least firmware version 22.07. Otherwise the gamma value will always be 1.0.Via the REST-API, this parameter can be set as follows.
PUT http://<host>/api/v2/pipelines/<0,1,2,3>/nodes/rc_camera/parameters?gamma=<value>PUT http://<host>/api/v1/nodes/rc_camera/parameters?gamma=<value>
exp_control (Exposure Auto, HDR or Manual)¶
The exposure control mode can be set to Auto, HDR or Manual. This replaces the deprecated exp_auto parameter.
Auto: This is the default mode in which the exposure time and gain factor is chosen automatically to correctly expose the image. The last automatically determined exposure and gain values are set into
exp_valueandgain_valuewhen switching auto-exposure off.HDR: The HDR mode computes high-dynamic-range images by combining images with different exposure times to avoid under-exposed and over-exposed areas. This decreases the frame rate and is only suitable for static scenes.
Manual: In the manual exposure mode the exposure time and gain are kept fixed independent of the resulting image brightness.
Note
For a pipeline of type
rc_visardthe HDR mode is only available when the connected rc_visard has at least firmware version 23.01.Via the REST-API, this parameter can be set as follows.
PUT http://<host>/api/v2/pipelines/<0,1,2,3>/nodes/rc_camera/parameters?exp_control=<value>PUT http://<host>/api/v1/nodes/rc_camera/parameters?exp_control=<value>
exp_auto_mode (Auto Exposure Mode)¶
The auto exposure mode can be set to Normal, Out1High or AdaptiveOut1. These modes are relevant when the rc_cube is used with an external light source or projector connected to the camera’s GPIO Out1, which can be controlled by the IOControl module (IO and Projector Control).
Normal: All images are considered for exposure control, except if the IOControl mode for GPIO Out1 is ExposureAlternateActive: then only images where GPIO Out1 is HIGH will be considered, since these images may be brighter in case GPIO Out1 is used to trigger an external light source.
Out1High: This exposure mode adapts the exposure time using only images with GPIO Out1 HIGH. Images where GPIO Out1 is LOW are not considered at all, which means, that the exposure time does not change when only images with Out1 LOW are acquired. This mode is recommended for using the
acquisition_modeSingleFrameOut1in the stereo matching module as described in Stereo Matching Parameters and having an external projector connected to GPIO Out1, when changes in the brightness of the scene should only be considered when Out1 is HIGH. This is the case, for example, when a bright part of the robot moves through the field of view of the camera just before a detection is triggered, which should not affect the exposure time.AdaptiveOut1: This exposure mode uses all camera images and tracks the exposure difference between images with GPIO Out1 LOW and HIGH. While the IOControl mode for GPIO Out1 is LOW, the images are under-exposed by this exposure difference to avoid over-exposure for when GPIO Out1 triggers an external projector. The resulting exposure difference is given as Out1 Reduction below the live images. This mode is recommended for using the
acquisition_modeSingleFrameOut1in the stereo matching module as described in Stereo Matching Parameters and having an external projector connected to GPIO Out1, when changes in the brightness of the scene should be considered at all times. This is the case, for example, in applications where the external lighting changes.Via the REST-API, this parameter can be set as follows.
PUT http://<host>/api/v2/pipelines/<0,1,2,3>/nodes/rc_camera/parameters?exp_auto_mode=<value>PUT http://<host>/api/v1/nodes/rc_camera/parameters?exp_auto_mode=<value>
exp_max (Max Exposure)¶
This value is the maximal exposure time in auto-exposure mode in seconds. The actual exposure time is adjusted automatically so that the images are exposed correctly. If the maximum exposure time is reached, but the images are still underexposed, the rc_cube stepwise increases the gain to increase the images’ brightness. Limiting the exposure time is useful for avoiding or reducing motion blur during fast movements. However, higher gain introduces noise into the image. The best trade-off depends on the application.
Via the REST-API, this parameter can be set as follows.
PUT http://<host>/api/v2/pipelines/<0,1,2,3>/nodes/rc_camera/parameters?exp_max=<value>PUT http://<host>/api/v1/nodes/rc_camera/parameters?exp_max=<value>
exp_auto_average_max (Max Brightness) and exp_auto_average_min (Min Brightness)¶
The auto-exposure tries to set the exposure time and gain factor such that the average intensity (i.e. brightness) in the image or exposure region is between a maximum and a minimum. The maximum brightness will be used if there is no saturation, e.g. no over-exposure due to bright surfaces or reflections. In case of saturation, the exposure time and gain factor are reduced, but only down to the minimum brightness.
The maximum brightness has precedence over the minimum brightness parameter. If the minimum brightness is larger than the maximum brightness, the auto-exposure always tries to make the average intensity equal to the maximum brightness.
The current brightness is always shown in the status bar below the images.
Via the REST-API, this parameter can be set as follows.
PUT http://<host>/api/v2/pipelines/<0,1,2,3>/nodes/rc_camera/parameters?<exp_auto_average_max|exp_auto_average_min>=<value>PUT http://<host>/api/v1/nodes/rc_camera/parameters?<exp_auto_average_max|exp_auto_average_min>=<value>
exp_offset_x, exp_offset_y, exp_width, exp_height (Exposure Region)¶
These values define a rectangular region in the left rectified image for limiting the area used for computing the auto exposure. The exposure time and gain factor of both images are chosen to optimally expose the defined region. This can lead to over- or underexposure of image parts outside the defined region. If either the width or height is 0, then the whole left and right images are considered by the auto exposure function. This is the default.
The region is visualized in the Web GUI by a rectangle in the left rectified image. It can be defined using the sliders or by selecting it in the image after pressing the button
Select Region in Image.Via the REST-API, this parameter can be set as follows.
PUT http://<host>/api/v2/pipelines/<0,1,2,3>/nodes/rc_camera/parameters?<exp_offset_x|exp_offset_y|exp_width|exp_height>=<value>PUT http://<host>/api/v1/nodes/rc_camera/parameters?<exp_offset_x|exp_offset_y|exp_width|exp_height>=<value>
exp_value (Exposure)¶
This value is the exposure time in manual exposure mode in seconds. This exposure time is kept constant even if the images are underexposed.
Via the REST-API, this parameter can be set as follows.
PUT http://<host>/api/v2/pipelines/<0,1,2,3>/nodes/rc_camera/parameters?exp_value=<value>PUT http://<host>/api/v1/nodes/rc_camera/parameters?exp_value=<value>
gain_value (Gain (dB))¶
This value is the gain factor in decibel that can be set in manual exposure mode. Higher gain factors reduce the required exposure time but introduce noise.
Via the REST-API, this parameter can be set as follows.
PUT http://<host>/api/v2/pipelines/<0,1,2,3>/nodes/rc_camera/parameters?gain_value=<value>PUT http://<host>/api/v1/nodes/rc_camera/parameters?gain_value=<value>
wb_auto (White Balance Auto or Manual)¶
This value can be set to true for automatic white balancing or false for manually setting the ratio between the colors using
wb_ratio_redandwb_ratio_blue. The last automatically determined ratios are set intowb_ratio_redandwb_ratio_bluewhen switching automatic white balancing off. White balancing is without function for monochrome cameras and will not be displayed in the Web GUI in this case.Via the REST-API, this parameter can be set as follows.
PUT http://<host>/api/v2/pipelines/<0,1,2,3>/nodes/rc_camera/parameters?wb_auto=<value>PUT http://<host>/api/v1/nodes/rc_camera/parameters?wb_auto=<value>
wb_ratio_blue and wb_ratio_red (Blue | Green and Red | Green)¶
These values are used to set blue to green and red to green ratios for manual white balance. White balancing is without function for monochrome cameras and will not be displayed in the Web GUI in this case.
Via the REST-API, this parameter can be set as follows.
PUT http://<host>/api/v2/pipelines/<0,1,2,3>/nodes/rc_camera/parameters?<wb_ratio_blue|wb_ratio_red>=<value>
PUT http://<host>/api/v1/nodes/rc_camera/parameters?<wb_ratio_blue|wb_ratio_red>=<value>
Status values¶
This module reports the following status values:
| Name | Description |
|---|---|
baseline |
Stereo baseline \(t\) in meters |
brightness |
Current brightness of the image as value between 0 and 1 |
color |
0 for monochrome cameras, 1 for color cameras |
exp |
Current exposure time in seconds. This value is shown below the image preview in the Web GUI as Exposure (ms). |
device_trigger_sources |
Gives the available trigger sources, in case the device can be triggered |
focal |
Focal length factor normalized to an image width of 1 |
fps |
Current frame rate of the camera images in Hertz. This value is shown in the Web GUI below the image preview as FPS (Hz). |
gain |
Current gain factor in decibel. This value is shown in the Web GUI below the image preview as Gain (dB). |
gamma |
Current gamma value. |
height |
Height of the camera image in pixels. This value is shown in the Web GUI below the image preview as the second part of Resolution (px). |
last_timestamp_grabbed |
Timestamp of the last image acquired in case the camera is in trigger mode |
out1_reduction |
Fraction of reduction (0.0 - 1.0) of brightness for images with GPIO Out1=LOW in exp_auto_mode=AdaptiveOut1 or exp_auto_mode=Out1High. This value is shown in the Web GUI below the image preview as Out1 Reduction (%). |
params_override_active |
1 if parameters are temporarily overwritten by a running calibration process |
selfcalib_counter |
How often a correction has been performed by the self-calibration |
selfcalib_offset |
Current offset determined by the self-calibration |
test |
0 for live images and 1 for test images |
width |
Width of the camera image in pixels. This value is shown in the Web GUI below the image preview as the first part of Resolution (px). |
Services¶
The camera module offers the following services.
acquisition_trigger¶
Triggers an image acquisition when
acquisition_modeis set toTriggerandtrigger_sourceis set toSoftware.Details
This service can be called as follows.
PUT http://<host>/api/v2/pipelines/0/nodes/rc_camera/services/acquisition_triggerPUT http://<host>/api/v1/nodes/rc_camera/services/acquisition_triggerThis service has no arguments.The definition for the response with corresponding datatypes is:
{ "name": "acquisition_trigger", "response": { "return_code": { "message": "string", "value": "int16" } } }
reset_defaults¶
Restores and applies the default values for this module’s parameters (“factory reset”).
Details
This service can be called as follows.
PUT http://<host>/api/v2/pipelines/<0,1,2,3>/nodes/rc_camera/services/reset_defaultsPUT http://<host>/api/v1/nodes/rc_camera/services/reset_defaultsThis service has no arguments.The definition for the response with corresponding datatypes is:
{ "name": "reset_defaults", "response": { "return_code": { "message": "string", "value": "int16" } } }