Stereokamera¶
Das Stereokamera-Modul ist ein Basismodul, das auf jedem rc_cube verfügbar ist, und beinhaltet Funktionen zur Erfassung von Stereo-Bildpaaren und zur planaren Rektifizierung, die nötig ist, um die Stereokamera als Messinstrument nutzen zu können.
Bilderfassung¶
Die Erfassung von Stereo-Bildpaaren ist der erste Schritt zur Stereovision. Da beide Kameras über Global Shutter verfügen und die Kamerachips per Hardware synchronisiert sind, werden alle Pixel beider Kameras immer zum exakt gleichen Zeitpunkt belichtet. Der Zeitpunkt in der Mitte der Bildbelichtung wird den Bildern als Zeitstempel angeheftet. Dieser Zeitstempel ist für dynamische Anwendungen wichtig, bei denen sich die Kamera oder die Szene bewegt.
Die Belichtungszeit lässt sich manuell auf einen festen Wert einstellen. Dies ist hilfreich in Umgebungen, in denen die Beleuchtung gesteuert werden kann, da die Lichtintensität so in allen Bildern gleich ist. Die Kamera ist standardmäßig auf automatische Belichtung eingestellt. In diesem Modus wird die Belichtungszeit automatisch, bis zu einem benutzerdefinierten Höchstwert, gewählt. Mit dem zulässigen Höchstwert soll eine mögliche Bewegungsunschärfe begrenzt werden: Hierzu kommt es, wenn Aufnahmen gemacht werden, während sich die Kamera oder die Szene bewegt. Die maximale Belichtungszeit hängt also von der Anwendung ab. Ist die maximale Belichtungszeit erreicht, nutzt der Algorithmus eine Verstärkung (Gain), um die Bildhelligkeit zu erhöhen. Höhere Gain-Faktoren verstärken jedoch auch das Bildrauschen. Es gilt daher, die maximale Belichtungszeit bei schwacher Beleuchtung so zu wählen, dass ein guter Kompromiss zwischen Bewegungsunschärfe und Bildrauschen erzielt wird.
Planare Rektifizierung¶
Kameraparameter, wie die Brennweite, die Objektivverzeichnung und die Stellung der Kameras zueinander, müssen genau bekannt sein, damit die Stereokamera als Messinstrument eingesetzt werden kann. Der rc_visard ist bereits ab Werk kalibriert und benötigt in der Regel keine Neukalibrierung. Die Kameraparameter beschreiben mit großer Präzision alle geometrischen Eigenschaften des Stereokamera-Systems, aber das daraus resultierende Modell ist komplex und kompliziert zu benutzen.
Rektifizierung bezeichnet den Prozess, Bilder auf Grundlage eines idealen Stereokamera-Modells zu reprojizieren. Dabei wird die Objektivverzeichnung korrigiert und die Bilder werden so ausgerichtet, dass ein Objektpunkt in beiden Aufnahmen immer auf die gleiche Bildzeile projiziert wird. Die Sichtachsen der Kameras liegen genau parallel zueinander. Dies bedeutet, dass Objektpunkte in unendlicher Distanz in beiden Aufnahmen auf die gleiche Bildspalte projiziert werden. Je näher ein Objektpunkt liegt, desto größer ist der Unterschied zwischen den Bildspalten im rechten und linken Bild. Dieser Unterschied wird Disparität genannt.
Mathematisch lässt sich die Projektion des Objektpunkts \(P=(P_x, P_y, P_z)\) auf den Bildpunkt \(p_l=(p_{lx}, p_{ly}, 1)\) im linken rektifizierten Bild und auf den Bildpunkt \(p_r=(p_{rx}, p_{ry}, 1)\) im rechten rektifizierten Bild wie folgt darstellen:
Die Brennweite \(f\) ist der Abstand zwischen der gemeinsamen Bildebene und den optischen Zentren der linken und rechten Kamera. Sie wird in Pixeln gemessen. Als Basisabstand \(t\) wird der Abstand zwischen den optischen Zentren beider Kameras bezeichnet. Auch die Bildbreite \(w\) und Bildhöhe \(h\) werden in Pixeln gemessen. \(s_1\) und \(s_2\) sind Skalierungsfaktoren, die sicherstellen, dass die dritten Koordinaten der Bildpunkte \(p_l\) und \(p_r\) 1 entsprechen.
Bemerkung
Der rc_cube stellt über seine verschiedenen Schnittstellen einen Brennweitenfaktor bereit. Er bezieht sich auf die Bildbreite, um verschiedene Bildauflösungen zu unterstützen. Die Brennweite \(f\) in Pixeln lässt sich leicht bestimmen, indem der Brennweitenfaktor mit der Bildbreite (in Pixeln) multipliziert wird.
Anzeigen und Herunterladen von Bildern¶
Der rc_cube bietet über die GenICam-Schnittstelle zeitgestempelte rektifizierte Bilder der linken und rechten Kamera (siehe Verfügbare Bild-Streams). Live-Streams in geringerer Qualität werden in der Web GUI bereitgestellt.
Die Web GUI bietet weiterhin die Möglichkeit, einen Schnappschuss der aktuellen Szene als .tar.gz-Datei zu speichern, wie in Herunterladen von Stereo-Bildern beschrieben wird.
Parameter¶
Das Stereokamera-Modul wird als rc_stereocamera bezeichnet und in der Web GUI auf der Seite Kamera dargestellt. Der Benutzer kann die Kamera-Parameter entweder dort oder direkt über die REST-API (REST-API-Schnittstelle) oder GigE Vision (GigE Vision 2.0/GenICam-Schnittstelle) ändern.
Bemerkung
Wird der rc_cube über GigE Vision genutzt, können die Kamera-Parameter nicht über die Web GUI oder REST-API geändert werden.
Übersicht über die Parameter¶
Dieses Softwaremodul bietet folgende Laufzeitparameter:
| Name | Typ | Min. | Max. | Default | Beschreibung |
|---|---|---|---|---|---|
exp_auto |
bool | false | true | true | Umschalten zwischen automatischer und manueller Belichtung |
exp_auto_average_max |
float64 | 0.0 | 1.0 | 0.75 | Maximaler Belichtungsmittelwert, wenn exp_auto auf true gesetzt ist |
exp_auto_average_min |
float64 | 0.0 | 1.0 | 0.25 | Maximaler Belichtungsmittelwert , wenn exp_auto auf true gesetzt ist |
exp_auto_mode |
string | - | - | Normal | Modus für automatische Belichtung: [Normal, Out1High, AdaptiveOut1] |
exp_height |
int32 | 0 | 959 | 0 | Höhe der Region für automatische Belichtung, 0 für das ganze Bild |
exp_max |
float64 | 6.6e-05 | 0.018 | 0.018 | Maximale Belichtungszeit in Sekunden, wenn exp_auto auf true gesetzt ist |
exp_offset_x |
int32 | 0 | 1279 | 0 | Erste Spalte der Region für automatische Belichtung |
exp_offset_y |
int32 | 0 | 959 | 0 | Erste Zeile der Region für automatische Belichtung |
exp_value |
float64 | 6.6e-05 | 0.018 | 0.005 | Maximale Belichtungszeit in Sekunden, wenn exp_auto auf false gesetzt ist |
exp_width |
int32 | 0 | 1279 | 0 | Breite der Region für automatische Belichtung, 0 für das ganze Bild |
fps |
float64 | 1.0 | 25.0 | 25.0 | Bildwiederholrate in Hertz |
gain_value |
float64 | 0.0 | 18.0 | 0.0 | Manuelle Verstärkung in Dezibel, wenn exp_auto auf false gesetzt ist |
wb_auto |
bool | false | true | true | Ein- und Ausschalten des manuellen Weißabgleichs (nur für Farbkameras) |
wb_ratio_blue |
float64 | 0.125 | 8.0 | 2.4 | Blau-zu-Grün-Verhältnis, falls wb_auto auf false gesetzt ist (nur für Farbkameras) |
wb_ratio_red |
float64 | 0.125 | 8.0 | 1.2 | Rot-zu-Grün-Verhältnis, falls wb_auto auf false gesetzt ist (nur für Farbkameras) |
Beschreibung der Laufzeitparameter¶
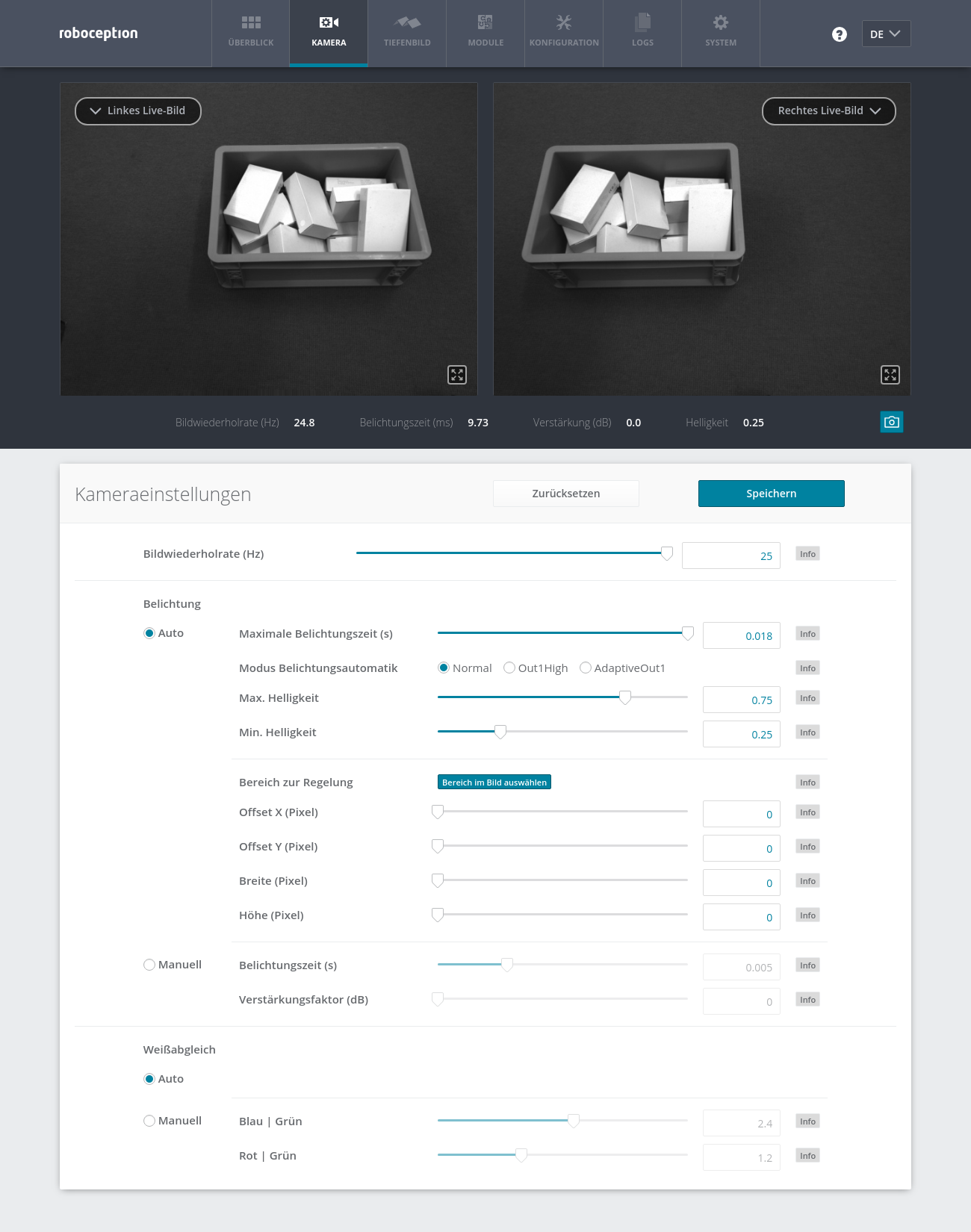
Abb. 6 Seite Kamera in der Web GUI
fps (Bildwiederholrate)¶
Dieser Wert bezeichnet die Bildwiederholrate der Kamera in Bildern pro Sekunde und begrenzt zugleich die Frequenz, mit der Tiefenbilder berechnet werden können. Die Bildwiederholrate entspricht auch der Frequenz, mit welcher der rc_cube Bilder über GigE Vision bereitstellt. Wird diese Frequenz verringert, reduziert sich auch die zur Übertragung der Bilder benötigte Bandbreite des Netzwerks.
Über die REST-API kann dieser Parameter wie folgt gesetzt werden.
PUT http://<host>/api/v1/nodes/rc_stereocamera/parameters?fps=<value>
exp_auto (Belichtungszeit Auto oder Manuell)¶
Dieser Wert lässt sich für den automatischen Belichtungsmodus auf true und für den manuellen Belichtungsmodus auf false setzen. Im manuellen Belichtungsmodus wird die gewählte Belichtungszeit konstant gehalten und die Verstärkung bleibt bei 0,0 dB, auch wenn die Bilder über- oder unterbelichtet sind. Im automatischen Belichtungsmodus werden die Belichtungszeit und der Verstärkungsfaktor automatisch angepasst, sodass das Bild korrekt belichtet wird. Wenn die Automatik abgeschaltet wird, werden
exp_valueundgain_valueauf die letzten von der Automatik ermittelten Werte für Belichtungszeit und Verstärkung gesetzt.Über die REST-API kann dieser Parameter wie folgt gesetzt werden.
PUT http://<host>/api/v1/nodes/rc_stereocamera/parameters?exp_auto=<value>
exp_auto_mode (Modus Belichtungsautomatik)¶
Der Modus für automatische Belichtung kann auf Normal, Out1High oder AdaptiveOut1 gesetzt werden. Diese Modi sind nur relevant, wenn der rc_cube mit einer externen Lichtquelle oder einem Projektor betrieben wird, der an den GPIO-Ausgang 1 des rc_visard angeschlossen ist. Dieser Ausgang kann durch das optionale IOControl-Modul (IOControl und Projektor-Kontrolle) gesteuert werden.
Normal: Alle Bilder werden für die Regelung der Belichtungszeit in Betracht gezogen, außer wenn der IOControl-Modus für den GPIO-Ausgang 1 ExposureAlternateActive ist: Dann werden nur Bilder berücksichtigt, bei denen GPIO-Ausgang 1 HIGH ist, da diese Bilder heller sein können, falls dieser GPIO-Ausgang benutzt wird um einen externen Projektor auszulösen.
Out1High: Die Belichtungszeit wird nur anhand der Bilder mit GPIO-Ausgang 1 HIGH angepasst. Bilder bei denen GPIO-Ausgang 1 LOW ist, werden für die Belichtungszeitregelung nicht berücksichtigt. Das bedeutet, die Belichtungszeit ändert sich nicht, solange nur Bilder mit GPIO-Ausgang 1 LOW aufgenommen werden. Dieser Modus wird für die Benutzung mit dem Single+Out1 Tiefenbild Aufnahmemodus (siehe Stereo Matching Parameters und externem Projektor empfohlen, wenn die Helligkeit der Szene nur zu den Zeitpunkten berücksichtigt werden soll, wenn GPIO-Ausgang 1 HIGH ist. Das ist zum Beispiel der Fall, wenn kurz vor einer Objekterkennung ein heller Teil des Roboters durch das Bild fährt, der die Belichtungseinstellungen jedoch nicht beeinflussen soll.
AdaptiveOut1: Dieser Modus nutzt alle Kamerabilder und speichert die Differenz der Belichtung zwischen Bildern mit GPIO Ausgang 1 HIGH und LOW. Während der IOControl-Modus für GPIO-Ausgang 1 LOW ist, werden die Bilder um diese Differenz unterbelichtet, um eine Überbelichtung zu verhindern, sobald der externe Projektor über GPIO-Ausgang 1 ausgelöst wird. Die Differenz der Belichtung wird als Out1 Reduktion unter den Livebildern angezeigt. Dieser Modus wird empfohlen, wenn im Stereo-Matching-Modul der Parameter
acquisition_modeaufSingleFrameOut1(Einzelbild+Out1) gesetzt ist (Parameter des Stereo-Matching-Moduls), und ein externer Projektor an den GPIO-Ausgang 1 angeschlossen ist, und wenn die Helligkeit der Szene zu jeder Zeit zur Belichtungszeitregelung berücksichtigt werden soll.Das ist zum Beispiel in Anwendungen mit veränderlichen äußeren Lichtbedingungen der Fall.Über die REST-API kann dieser Parameter wie folgt gesetzt werden.
PUT http://<host>/api/v1/nodes/rc_stereocamera/parameters?exp_auto_mode=<value>
exp_max (Maximale Belichtungszeit)¶
Dieser Wert gibt die maximale Belichtungszeit im automatischen Modus in Sekunden an. Die tatsächliche Belichtungszeit wird automatisch angepasst, sodass das Bild korrekt belichtet wird. Sind die Bilder trotz maximaler Belichtungszeit noch immer unterbelichtet, erhöht der rc_cube schrittweise die Verstärkung, um die Helligkeit der Bilder zu erhöhen. Es ist sinnvoll, die Belichtungszeit zu begrenzen, um die bei schnellen Bewegungen auftretende Bildunschärfe zu vermeiden oder zu verringern. Jedoch führt eine höhere Verstärkung auch zu mehr Bildrauschen. Welcher Kompromiss der beste ist, hängt immer auch von der Anwendung ab.
Über die REST-API kann dieser Parameter wie folgt gesetzt werden.
PUT http://<host>/api/v1/nodes/rc_stereocamera/parameters?exp_max=<value>
exp_auto_average_max (Maximale Helligkeit) und exp_auto_average_min (Minimale Helligkeit)¶
Die automatische Belichtungszeitsteuerung versucht die Belichtungszeit und den Verstärkungsfaktor so einzustellen, dass die mittlere Bildhelligkeit im Bild oder im Bereich zur Regelung zwischen der maximalen und minimalen Helligkeit liegt. Die maximale Helligkeit wird benutzt, wenn keine Bildteile in der Sättigung sind, d.h. keine Überbelichtung durch helle Oberflächen oder Reflexionen vorhanden sind. Falls Sättigungen auftreten, werden die Belichtungszeit und der Verstärkungsfaktor verringert, aber nur bis zur eingestellten minimalen Helligkeit.
Der Parameter für die maximale Helligkeit hat Vorrang über den Parameter der minimalen Helligkeit. Falls die minimale Helligkeit größer als die maximale ist, versucht die automatische Belichtungszeitsteuerung die mittlere Bildhelligkeit auf die maximale Helligkeit zu setzen.
Die aktuelle Helligkeit wird in der Statuszeile unter den Bildern angezeigt.
Über die REST-API kann dieser Parameter wie folgt gesetzt werden.
PUT http://<host>/api/v1/nodes/rc_stereocamera/parameters?<exp_auto_average_max|exp_auto_average_min>=<value>
exp_offset_x, exp_offset_y, exp_width, exp_height (Bereich zur Regelung)¶
Diese Werte definieren eine rechteckige Region im linken rektifizierten Bild, um den von der automatischen Belichtung überwachten Bereich zu limitieren. Die Belichtungszeit und der Verstärkungsfaktor werden so gewählt, dass die definierte Region optimal belichtet wird. Dies kann zu Über- oder Unterbelichtung in anderen Bildbereichen führen. Falls die Breite oder Höhe auf 0 gesetzt werden, dann wird das gesamte linke und rechte Bild von der automatischen Belichtungsfunktion berücksichtigt. Dies ist die Standardeinstellung.
Die Region wird in der Web GUI mit einem Rechteck im linken rektifizierten Bild visualisiert. Sie kann über Slider oder direkt im Bild mithilfe der Schaltfläche
Bereich im Bild auswählenverändert werden.Über die REST-API kann dieser Parameter wie folgt gesetzt werden.
PUT http://<host>/api/v1/nodes/rc_stereocamera/parameters?<exp_offset_x|exp_offset_y|exp_width|exp_height>=<value>
exp_value (Belichtungszeit)¶
Dieser Wert gibt die Belichtungszeit im manuellen Modus in Sekunden an. Diese Belichtungszeit wird konstant gehalten, auch wenn die Bilder unterbelichtet sind.
Über die REST-API kann dieser Parameter wie folgt gesetzt werden.
PUT http://<host>/api/v1/nodes/rc_stereocamera/parameters?exp_value=<value>
gain_value (Verstärkungsfaktor)¶
Dieser Wert gibt den Verstärkungsfaktor im manuellen Modus in Dezibel an. Höhere Verstärkungswerte reduzieren die Belichtungszeit, führen aber zu Rauschen.
Über die REST-API kann dieser Parameter wie folgt gesetzt werden.
PUT http://<host>/api/v1/nodes/rc_stereocamera/parameters?gain_value=<value>
wb_auto (Weißabgleich Auto oder Manuell)¶
Dieser Wert kann auf true gesetzt werden, um den automatischen Weißabgleich anzuschalten. Bei false kann das Verhältnis der Farben manuell mit
wb_ratio_redundwb_ratio_bluegesetzt werden.wb_ratio_redundwb_ratio_bluewerden auf die letzten von der Automatik ermittelten Werte gesetzt, wenn diese abgeschaltet wird. Der Weißabgleich ist bei monochromen Kameras ohne Funktion und wird in diesem Fall in der Web GUI nicht angezeigt.Über die REST-API kann dieser Parameter wie folgt gesetzt werden.
PUT http://<host>/api/v1/nodes/rc_stereocamera/parameters?wb_auto=<value>
wb_ratio_blue und wb_ratio_red (Blau | Grün and Rot | Grün)¶
Mit diesen Werten kann das Verhältnis von Blau zu Grün bzw. Rot zu Grün für einen manuellen Weißabgleich gesetzt werden. Der Weißabgleich ist bei monochromen Kameras ohne Funktion und wird in diesem Fall in der Web GUI nicht angezeigt.
Über die REST-API kann dieser Parameter wie folgt gesetzt werden.
PUT http://<host>/api/v1/nodes/rc_stereocamera/parameters?<wb_ratio_blue|wb_ratio_red>=<value>
Die gleichen Parameter sind – mit leicht abweichenden Namen und teilweise mit anderen Einheiten oder Datentypen – auch über die GenICam-Schnittstelle verfügbar (siehe GigE Vision 2.0/GenICam-Schnittstelle).
Statuswerte¶
Dieses Modul meldet folgende Statuswerte:
| Name | Beschreibung |
|---|---|
out1_reduction |
Anteil der Helligkeits-Reduktion (0.0 - 1.0) für Bilder mit GPIO-Ausgang 1=LOW, wenn exp_auto_mode=AdaptiveOut1 oder exp_auto_mode=Out1High |
baseline |
Basisabstand \(t\) der Stereokamera in Metern |
brightness |
Aktuelle Helligkeit als Wert zwischen 0 und 1 |
color |
0 für monochrome Kameras, 1 für Farbkameras |
exp |
Aktuelle Belichtungszeit in Sekunden. Dieser Wert wird unter der Bildvorschau in der Web GUI als Belichtungszeit (ms) angezeigt. |
focal |
Brennweitenfaktor, normalisiert auf eine Bildbreite von 1 |
fps |
Aktuelle Bildwiederholrate der Kamerabilder in Hertz. Dieser Wert wird unter der Bildvorschau in der Web GUI als Bildwiederholrate (Hz) angezeigt. |
gain |
Aktueller Verstärkungsfaktor in Dezibel. Dieser Wert wird unter der Bildvorschau in der Web GUI als Verstärkung (dB) angezeigt. |
height |
Höhe des Kamerabildes in Pixeln |
temp_left |
Temperatur des linken Kamerasensors in Grad Celsius |
temp_right |
Temperatur des rechten Kamerasensors in Grad Celsius |
test |
0 for Live-Bilder und 1 für Test-Bilder |
time |
Verarbeitungszeit für die Bilderfassung in Sekunden |
width |
Breite des Kamerabildes in Pixeln |
Services¶
Das Stereokamera-Modul bietet folgende Services, um Parametereinstellungen zu speichern bzw. wiederherzustellen.
save_parameters¶
speichert die aktuellen Parametereinstellungen des Stereokamera-Moduls auf dem rc_cube. Das bedeutet, dass diese Werte selbst nach einem Neustart angewandt werden. Sie bleiben auch bei Firmware-Updates oder -Wiederherstellungen bestehen.
Details
Dieser Service kann wie folgt aufgerufen werden.
PUT http://<host>/api/v1/nodes/rc_stereocamera/services/save_parametersDieser Service hat keine Argumente.Die Definition der Response mit jeweiligen Datentypen ist:
{ "name": "save_parameters", "response": { "return_code": { "message": "string", "value": "int16" } } }
reset_defaults¶
stellt die Werkseinstellungen der Parameter dieses Moduls wieder her und wendet sie an („factory reset“).
Details
Dieser Service kann wie folgt aufgerufen werden.
PUT http://<host>/api/v1/nodes/rc_stereocamera/services/reset_defaultsDieser Service hat keine Argumente.Die Definition der Response mit jeweiligen Datentypen ist:
{ "name": "reset_defaults", "response": { "return_code": { "message": "string", "value": "int16" } } }