Installation¶
Warnung
Vor Installation des Gerätes müssen die Hinweise zur Sicherheit des rc_cube gelesen und verstanden werden.
Der rc_cube verfügt über mehrere Gigabit-Ethernet-Schnittstellen:
- Eine mit „external“ beschriftete Schnittstelle für den Anschluss an ein Computernetzwerk, und
- bis zu vier mit „sensor<N>“ beschriftete Schnittstellen für den Anschluss einer oder mehrerer 3D-Kameras, wie den rc_visard oder rc_viscore oder den Basler blaze Sensor (siehe Anschluss von Kameras).
Alle anderen Ethernet-Schnittstellen sind deaktiviert.
Für die Inbetriebnahme, bzw. während des Betriebs oder zur Fehlerbehandlung, können Eingabegeräte wie Maus und Tastatur sowie ein Computerbildschirm an den rc_cube angeschlossen werden. Dies ist jedoch nur optional, denn über das verbundene, lokale Netzwerk kann der Nutzer auf alle Funktionalitäten des rc_cube zugreifen.
Bemerkung
Wenn ein Bildschirm am rc_cube verwendet werden soll, dann muss er bereits beim Booten verbunden sein, oder der rc_cube muss neu gestartet werden, um den Bildschirm zu aktivieren.
Softwarelizenz¶
Jeder rc_cube wird mit einem USB-Dongle zur Lizenzierung und zum Schutz der installierten Softwarepakete ausgeliefert. Die erworbenen Lizenzen sind auf diesem Dongle installiert und somit an ihn und seine ID gebunden.
Die Funktionalität des rc_cube kann jederzeit durch ein Upgrade der Lizenz erweitert werden – zum Beispiel für zusätzlich erhältliche, optionale Softwaremodule.
Bemerkung
Der rc_cube muss neu gestartet werden, sobald die Softwarelizenz geändert wurde.
Bemerkung
Der Status der Softwarelizenz kann über die verschiedenen Schnittstellen des rc_cube abgefragt werden, zum Beispiel über die Seite in der Web GUI.
Bemerkung
Damit die Lizenzierung der Softwaremodule ordnungsgemäß funktioniert, muss der USB-Dongle an den rc_cube angesteckt werden, bevor dieser gestartet wird.
Bemerkung
Der rc_cube muss neu gestartet werden, sobald der Dongle eingesteckt oder abgezogen wurde.
Einschalten¶
Bemerkung
Der rc_cube I wird nicht mit einer Stromversorgung ausgeliefert. Ein separates 24V/20Amp (z.B. Hutschienen-) Netzteil wird benötigt.
Der rc_cube wird mit der Einschalttaste am Gerät gestartet. Ist ein Computerbildschirm angeschlossen, zeigt dieser die Web GUI an, sobald der Boot-Vorgang des rc_cube abgeschlossen ist.
Bemerkung
Zur Gewährleistung eines erfolgreichen Betriebs stellen Sie sicher, dass der mit dem rc_cube verbundene rc_visard mit Strom versorgt und dessen Boot-Vorgang abgeschlossen ist.
Aufspüren von rc_cube-Geräten¶
Roboception-rc_cube-Geräte, die eingeschaltet und mit dem lokalen Netzwerk oder direkt mit einem Computer verbunden sind, können über den Discover-Mechanismus von GigE Vision® ausfindig gemacht werden.
Das Open-Source-Tool rcdiscover-gui kann für Windows und Linux kostenlos von der Roboception-Homepage heruntergeladen werden: http://www.roboception.com/download. Dieses Tool besteht für Windows 7 und Windows 10 aus einer einzigen ausführbaren Datei, die ohne Installation direkt ausgeführt werden kann. Für Linux ist ein Installationspaket für Ubuntu erhältlich.
Nach dem Start wird jedes verfügbare GigE Vision®-Gerät, und damit auch jeder verfügbare rc_cube, mit seinem Namen, seiner Seriennummer, der aktuellen IP-Adresse und der eindeutigen MAC-Adresse aufgelistet. Das Discovery-Tool findet alle Geräte, die sich über globale Broadcasts erreichen lassen. Es kann vorkommen, dass falsch konfigurierte Geräte aufgeführt werden, die anderen Subnetzen als dem des Computers angehören. Ein Häkchen im Discovery-Tool gibt an, ob ein Gerät richtig konfiguriert und damit auch über einen Webbrowser erreichbar ist.
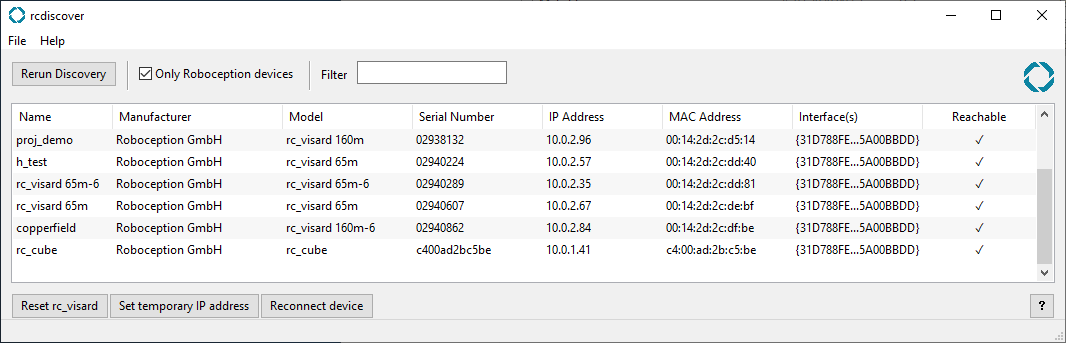
Abb. 2 rcdiscover-gui-Tool zum Aufspüren angeschlossener GigE Vision®-Geräte
Wurde das Gerät erfolgreich gefunden, öffnet sich nach einem Doppelklick auf den Geräteeintrag die Web GUI des Geräts im Standard-Browser des Betriebssystems. Wir empfehlen, Google Chrome oder Mozilla Firefox als Webbrowser zu verwenden.
Zurücksetzen der Konfiguration¶
Bemerkung
Der Zurücksetzmechanismums des rcdiscover-gui-Tools ist für rc_cube-Geräte im Moment nicht implementiert.
Netzwerkkonfiguration¶
Für die Kommunikation mit anderen Netzwerkgeräten muss dem rc_cube eine Internet-Protokoll-Adresse (IP) zugewiesen werden. Jede IP-Adresse darf innerhalb des lokalen Netzwerks nur einmal vergeben werden. Sie kann entweder manuell mittels einer durch den Nutzer zugewiesenen persistenten (d.h. statischen) IP-Adresse festgelegt oder automatisch per DHCP zugewiesen werden. Ist keine der Methoden verfügbar oder aktiviert, greift der rc_cube auf eine Link-Local-Adresse zurück.
Die Netzwerkeinstellungen des rc_visard, welcher mit dem rc_cube zusammen betrieben wird, werden automatisch passend konfiguriert, sobald der rc_visard mit dem rc_cube verbunden wird.
Warnung
Um Adresskonflikte mit dem internen Netzwerk zwischen dem rc_cube und dem verbundenen rc_visard zu vermeiden, muss die für den rc_cube gewählte IP-Adresse außerhalb des Adressbereichs 172.23.42.0/24 und 172.17.0.0/16 liegen.
Nach dem GigE Vision®-Standard wird die Konfiguration der IP-Adresse in folgender Priorität und Reihenfolge durchgeführt:
- Persistente IP (falls aktiviert)
- DHCP (falls aktiviert)
- Link-Local
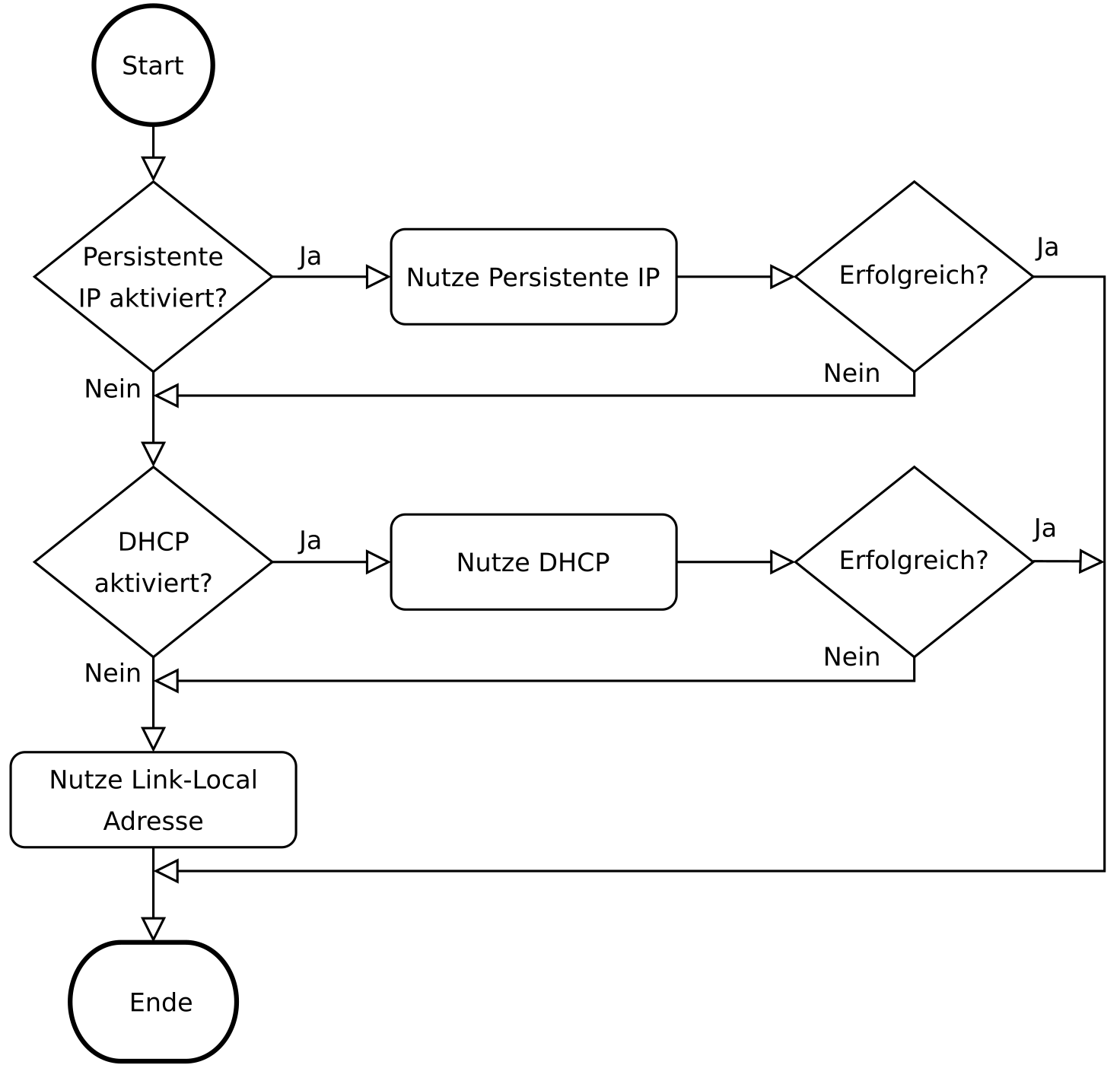
Abb. 3 Flussdiagramm für die Auswahl der IP-Konfigurationsmethoden des rc_cube
Zur Konfiguration der Netzwerkeinstellungen und IP-Adresse des rc_cube stehen folgende Möglichkeiten zur Verfügung:
- die Seite der rc_cube-Web GUI – falls diese im lokalen Netzwerk bereits erreichbar ist, siehe Web GUI
- alle Konfigurationsprogramme, welche mit GigE Vision® 2.0 kompatibel sind, oder das Roboception Kommandozeilenprogramm
gc_config. Üblicherweise wird nach dem Start dieser Programme das Netzwerk nach allen verfügbaren GigE Vision®-Sensoren durchsucht. Alle rc_cube-Geräte können über ihre Seriennummer und MAC-Adresse, die beide auf dem Gerät aufgedruckt sind, eindeutig identifiziert werden.- das Roboception
rcdiscover-gui-Tool, welches temporäre Änderungen oder das vollständige Zurücksetzen der Netzwerkkonfiguration des rc_cube erlaubt, siehe Aufspüren von rc_cube-Geräten
Bemerkung
Das Kommandozeilenprogramm gc_config ist Bestandteil der Roboception Open-Source-Bibliothek rc_genicam_api, welche kostenlos für Windows und Linux von folgender Seite heruntergeladen werden kann: http://www.roboception.com/download.
Host-Name¶
Der Host-Name des rc_cube basiert auf dessen Seriennummer, welche auf dem Gerät aufgedruckt ist, und lautet rc-cube-<serial number>.
Automatische Konfiguration (werkseitige Voreinstellung)¶
Für die Zuweisung von IP-Adressen wird bevorzugt auf DHCP zugegriffen. Ist DHCP (werkseitige Voreinstellung auf dem rc_cube) aktiviert, versucht das Gerät, wann immer das Netzwerkkabel eingesteckt wird, einen DHCP-Server zu kontaktieren. Ist ein DHCP-Server im Netzwerk verfügbar, wird die IP-Adresse automatisch konfiguriert.
In einigen Netzwerken ist der DHCP-Server so konfiguriert, dass lediglich bekannte Geräte akzeptiert werden. In diesem Fall muss die auf dem Gerät aufgedruckte „Media Access Control“-Adresse, kurz MAC-Adresse, im DHCP-Server konfiguriert werden. Zudem ist der ebenfalls aufgedruckte Host-Name des rc_cube im Domain Name Server DNS einzustellen. Sowohl die MAC-Adresse als auch der Host-Name sind zu Konfigurationszwecken an den Netzwerkadministrator zu übermitteln.
Kann der rc_cube nicht innerhalb von 15 Sekunden nach dem Einschalten bzw. dem Einstecken des Netzwerkkabels Kontakt zu einem DHCP-Server aufbauen, versucht er, sich selbst eine eindeutige IP-Adresse zuzuweisen. Dieser Prozess heißt Link-Local. Diese Option ist besonders nützlich, wenn der rc_cube direkt an einen Computer angeschlossen werden soll. In diesem Fall muss auch der Computer mit einer Link-Local-Adresse konfiguriert sein. Bei manchen Betriebssystemen wie Windows 10 ist Link-Local bereits standardmäßig als Fallback eingestellt. Bei der Arbeit mit anderen Betriebssystemen, wie z.B. Linux, muss die Link-Local-Adresse direkt im Netzwerkmanager konfiguriert werden.
Manuelle Konfiguration¶
In einigen Fällen kann es nützlich sein, manuell eine persistente, d.h. statische IP-Adresse einzurichten. Diese wird auf dem rc_cube gespeichert und beim Systemstart bzw. beim Verbindungswiederaufbau zugewiesen. Bitte stellen Sie sicher, dass die Einstellungen der IP-Adresse, der Subnetz-Maske und des Default-Gateway keine Konflikte im Netzwerk verursachen.
Warnung
Die IP-Adresse muss eindeutig sein und innerhalb des Gültigkeitsbereichs des lokalen Netzwerks liegen. Zudem muss die Subnetz-Maske dem lokalen Netzwerk entsprechen, da anderenfalls möglicherweise nicht auf den rc_cube zugegriffen werden kann. Dieses Problem lässt sich vermeiden, indem die unter Automatische Konfiguration (werkseitige Voreinstellung) beschriebene automatische Konfiguration genutzt wird.
Kann die gewählte IP-Adresse nicht zugewiesen werden, zum Beispiel weil ein anderes Gerät im lokalen Netzwerk diese bereits verwendet, wird auf die automatische IP-Konfiguration mittels DHCP (falls aktiviert) oder Link-Local zurückgegriffen.
Anschluss von Kameras¶
Abhängig vom Modell des rc_cube können zwei oder mehr 3D Kameras an die Ethernet-Ports mit der Beschriftung sensor0, sensor1, etc. angeschlossen werden.
Der rc_cube S hat einen 2.5 Gigabit-Ethernet-Port für den Anschluss von bis zu zwei Sensoren, z.B.
- Anschluss eines rc_visard ohne zusätzliche Hardware
- Anschluss zweier rc_visard über einen separaten 2.5Gbit Switch
- Anschluss eines rc_viscore über einen separaten 2.5Gbit Switch
- Anschluss einer blaze über einen separaten 2.5Gbit Switch
Der rc_cube I hat vier 1 Gigabit-Ethernet-Ports für den Anschluss von bis zu vier Sensoren, z.B.
- Anschluss von bis zu vier rc_visard Sensoren ohne zusätzliche Hardware
- Anschluss von bis zu zwei rc_viscore Sensoren ohne zusätzliche Hardware
- Anschluss von bis zu zwei blaze Sensoren ohne zusätzliche Hardware
Es können auch verschiedene 3D Kameras mit dem rc_cube verbunden werden, so lange die Ethernetanschlüsse ausreichen. Jedoch unterstützt der rc_cube S maximal zwei Sensoren zur gleichen Zeit, der rc_cube I maximal vier.
Warnung
Der rc_viscore oder der Basler blaze Sensor dürfen nicht über einen Switch mit 1Gbit oder weniger angeschlossen werden, da das zu starkem Bildverlust führt.
Der rc_cube bietet bis zu vier Software-Kamerapipelines für die Prozessierung der Daten der angeschlossenen Sensoren. Die Konfiguration der Kamerapipelines wird in Kamerapipelines beschrieben.
Basler blaze Sensoren¶
Nach dem Anschluss eines Basler blaze Sensors kann es bis zu einer Minute dauern, bis dieser gefunden wird. Beim erstmaligen Anschluss an den rc_cube ist der Sensor noch unkalibriert und muss kalibriert werden, bevor er verwendet werden kann. Die Kalibrierung erfolgt über die Web GUI auf der Seite Kamerakalibrierung unter Konfiguration in der entsprechenden Pipeline. Sobald die Kalibrierung gespeichert wurde, verbleibt sie permanent auf dem rc_cube und wird automatisch angewendet, wenn der blaze Sensor wieder mit dem rc_cube verbunden wird, unabhängig von Port und Kamerapipeline.