Overview¶
The rc_cube is a high-performance 3D-image-processing device that is developed to enhance the computing capabilities of the Roboception stereo-camera rc_visard.
The rc_cube provides real-time camera images and disparity images, which can also be used to compute depth images and 3D point clouds. Additionally, it provides confidence and error images as quality measures for each image acquisition. It offers an intuitive web UI (user interface) and a standardized GenICam interface, making it compatible with all major image processing libraries.
With optionally available rc_reason modules the rc_cube provides out-of-the-box solutions for object detection and robotic pick-and-place applications.

Fig. 1 rc_visard 65 and rc_visard 160
The terms “sensor,” “rc_visard 65,” and “rc_visard 160” used throughout the manual all refer to the Roboception rc_visard family of self-registering cameras. Installation and control for all sensors are exactly the same, and all use the same mounting base.
Note
Unless specified, the information provided in this manual applies to both the rc_visard 65 and rc_visard 160 versions of the Roboception sensor.
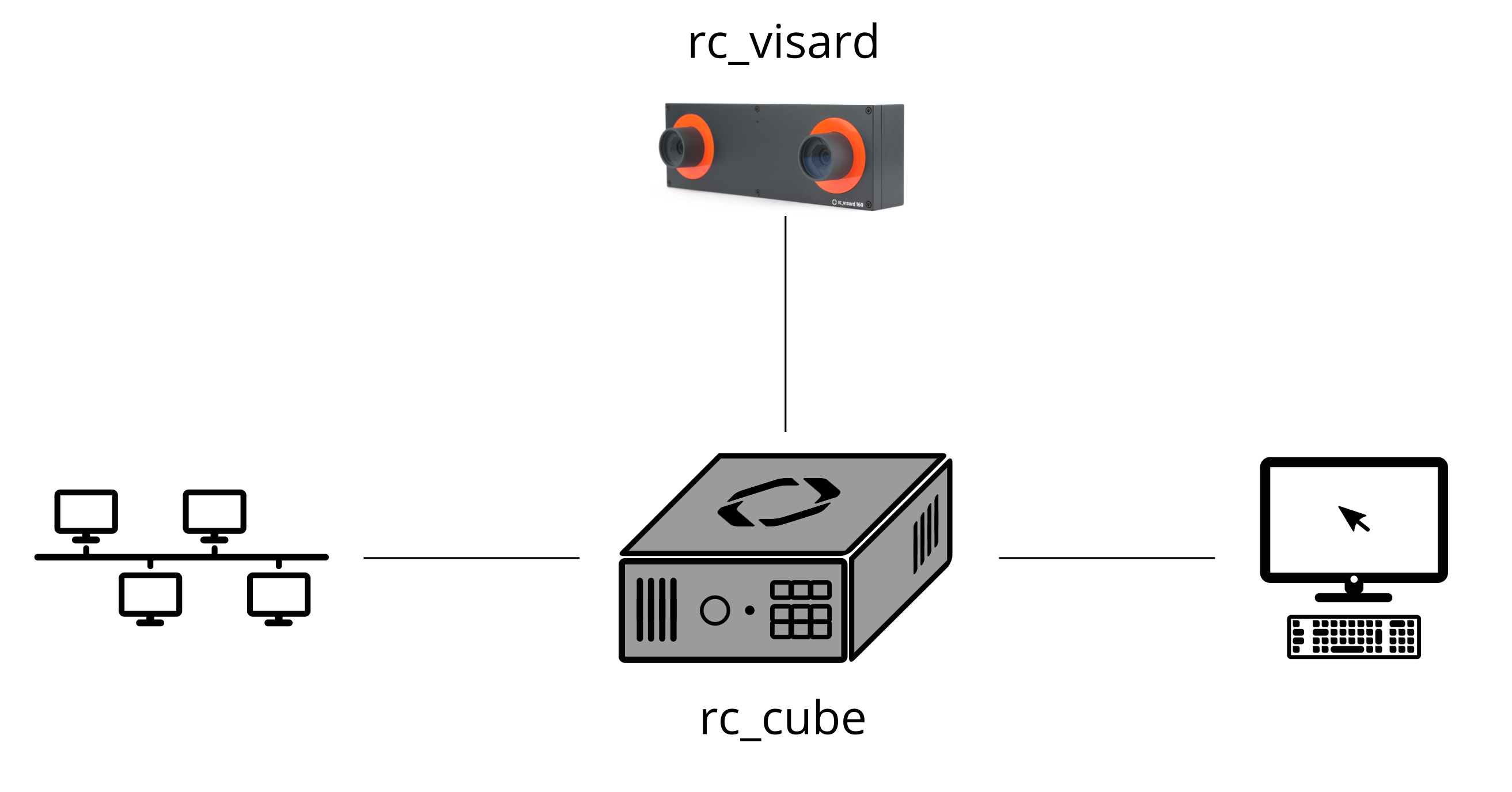
Fig. 2 The rc_cube
Note
This manual uses the metric system and mostly uses the units meter and millimeter. Unless otherwise specified, all dimensions in technical drawings are in millimeters.