Überblick¶
Der rc_cube ist ein Gerät zur performanten, 3D-Bildverarbeitung, welches die Rechenkapazitäten der Roboception Stereokamera rc_visard erweitert.
Der rc_cube stellt Echtzeit-Kamerabilder und Disparitätsbilder bereit, die auch zur Berechnung von Tiefenbildern und 3D-Punktewolken verwendet werden können. Zudem erstellt er Konfidenz- und Fehlerbilder, mit denen sich die Qualität der Bilderfassung messen lässt. Dank der standardisierten GenICam-Schnittstelle ist er mit allen großen Bildverarbeitungsbibliotheken kompatibel und bietet darüber hinaus eine intuitive, web-basierte Bedienoberfläche an.
Mit optional erhältlichen rc_reason Softwaremodulen bietet der rc_cube Standardlösungen für Anwendungen in der Objekterkennung oder für robotische Pick-and-Place-Applikationen.

Abb. 1 rc_visard 65 und rc_visard 160
Werden im vorliegenden Handbuch die Begriffe „Sensor“, „rc_visard 65“ und „rc_visard 160“ verwendet, so beziehen sich diese auf die von Roboception angebotene rc_visard-Produktfamilie an selbstregistrierenden Kameras. Die Installation und Steuerung all dieser Sensoren sind absolut identisch. Zudem verwenden alle den gleichen Montagesockel.
Bemerkung
Sofern nicht anders angegeben, gelten die in diesem Handbuch enthaltenen Informationen für beide Versionen des Roboception-Sensors, d.h. für den rc_visard 65 und den rc_visard 160.
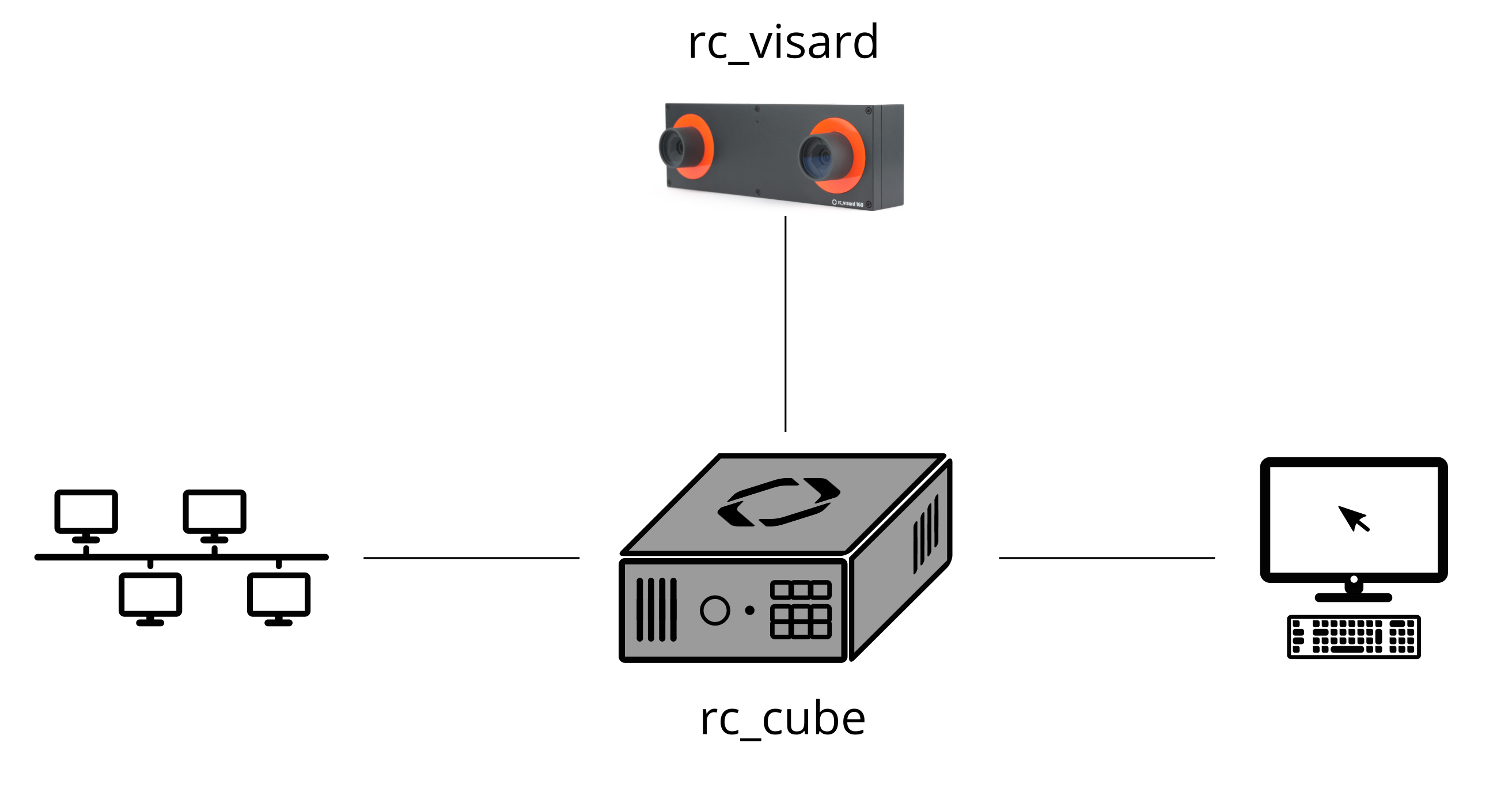
Abb. 2 Der rc_cube
Bemerkung
Das vorliegende Handbuch nutzt das metrische System und verwendet vorrangig die Maßeinheiten Meter und Millimeter. Sofern nicht anders angegeben, sind Abmessungen in technischen Zeichnungen in Millimetern angegeben.