Hand-Auge-Kalibrierung¶
Für Anwendungen, bei denen die Kamera in eines oder mehrere Robotersysteme integriert wird, muss sie zum jeweiligen Roboter-Koordinatensystem kalibriert werden. Zu diesem Zweck wird der rc_cube mit einer internen Kalibrierroutine, dem Modul zur Hand-Auge-Kalibrierung, ausgeliefert. Dieses Modul ist ein Basismodul, welches auf jedem rc_cube verfügbar ist.
Bemerkung
Für die Hand-Auge-Kalibrierung ist es völlig unerheblich, in Bezug auf welches benutzerdefinierte Roboter-Koordinatensystem die Kamera kalibriert wird. Hierbei kann es sich um einen Endeffektor des Roboters (z.B. Flansch oder Tool Center Point (Werkzeugmittelpunkt)) oder um einen beliebigen anderen Punkt in der Roboterstruktur handeln. Einzige Voraussetzung für die Hand-Auge-Kalibrierung ist, dass die Pose (d.h. Positions- und Rotationswerte) dieses Roboter-Koordinatensystems in Bezug auf ein benutzerdefiniertes externes Koordinatensystem (z.B. Welt oder Roboter-Montagepunkt) direkt von der Robotersteuerung erfasst und an das Kalibriermodul übertragen werden kann.
Die Kalibrierroutine ist ein benutzerfreundliches dreistufiges Verfahren, für das mit einem Kalibriermuster gearbeitet wird. Entsprechende Kalibriermuster können von Roboception bezogen werden.
Kalibrierschnittstellen¶
Für die Durchführung der Hand-Auge-Kalibrierung stehen die folgenden beiden Schnittstellen zur Verfügung:
Alle Services und Parameter dieses Moduls, die für eine programmgesteuerte Durchführung der Hand-Auge-Kalibrierung benötigt werden, sind in der REST-API-Schnittstelle des rc_cube enthalten. Der REST-API-Name dieses Moduls lautet
rc_hand_eye_calibrationund seine Services werden in Services erläutert.Bemerkung
Für den beschriebenen Ansatz wird eine Netzwerkverbindung zwischen dem rc_cube und der Robotersteuerung benötigt, damit die Steuerung die Roboterposen an das Kalibriermodul des rc_cube übertragen kann.
Für Anwendungsfälle, bei denen sich die Roboterposen nicht programmgesteuert an das Modul zur Hand-Auge-Kalibrierung des rc_cube übertragen lassen, sieht die Seite Hand-Auge-Kalibrierung unter dem Menüpunkt Konfiguration der Web GUI einen geführten Prozess vor, mit dem sich die Kalibrierroutine manuell durchführen lässt.
Bemerkung
Während der Kalibrierung muss der Benutzer die Roboterposen, auf die über das jeweilige Teach-in- oder Handheld-Gerät zugegriffen werden muss, manuell in die Web GUI eingeben.
Kameramontage¶
Wie in Abb. 23 und Abb. 25 dargestellt, ist für die Montage der Kamera zwischen zwei unterschiedlichen Anwendungsfällen zu unterscheiden:
- Die Kamera wird am Roboter montiert, d.h. sie ist mechanisch mit einem Roboterpunkt (d.h. Flansch oder flanschmontiertes Werkzeug) verbunden und bewegt sich demnach mit dem Roboter.
- Die Kamera ist nicht am Roboter montiert, sondern an einem Tisch oder anderen Ort in der Nähe des Roboters befestigt und verbleibt daher verglichen mit dem Roboter in einer statischen Position.
Die allgemeine Kalibrierroutine ist in beiden Anwendungsfällen sehr ähnlich. Sie unterscheidet sich jedoch hinsichtlich der semantischen Auslegung der Ausgabedaten, d.h. der erhaltenen Kalibriertransformation, und hinsichtlich der Befestigung des Kalibriermusters.
- Kalibrierung einer robotergeführten Kamera
Soll eine robotergeführte Kamera zum Roboter kalibriert werden, so muss das Kalibriermuster in einer statischen Position zum Roboter, z.B. auf einem Tisch oder festen Sockel, befestigt werden (siehe Abb. 23).
Warnung
Es ist äußerst wichtig, dass sich das Kalibriermuster in Schritt 2 der Kalibrierroutine nicht bewegt. Daher wird dringend empfohlen, das Muster in seiner Position sicher zu fixieren, um unbeabsichtigte Bewegungen, wie sie durch Vibrationen, Kabelbewegungen oder Ähnliches ausgelöst werden, zu verhindern.
Das Ergebnis der Kalibrierung (Schritt 3 der Kalibrierroutine) ist eine Pose \(\mathbf{T}^{\text{robot}}_{\text{camera}}\), die die (zuvor unbekannte) relative Transformation zwischen dem Kamera-Koordinatensystem und dem benutzerdefinierten Roboter-Koordinatensystem beschreibt, sodass Folgendes gilt:
(3)¶\[\mathbf{p}_{\text{robot}} = \mathbf{R}^{\text{robot}}_{\text{camera}} \cdot \mathbf{p}_{\text{camera}} + \mathbf{t}^{\text{robot}}_{\text{camera}} \:,\]wobei \(\mathbf{p}_{\text{robot}} = (x,y,z)^T\) ein 3D-Punkt ist, dessen Koordinaten im Roboter-Koordinatensystem angegeben werden, \(\mathbf{p}_{\text{camera}}\) denselben Punkt im Kamera-Koordinatensystem darstellt, und \(\mathbf{R}^{\text{robot}}_{\text{camera}}\) sowie \(\mathbf{t}^{\text{robot}}_{\text{camera}}\) die \(3\times 3\) Drehmatrix und den \(3\times 1\) Translationsvektor für eine Pose \(\mathbf{T}^{\text{robot}}_{\text{camera}}\) angeben. In der Praxis wird die Rotation für das Kalibrierergebnis und die Roboterposen als Eulerwinkel oder Quaternion anstatt einer Rotationsmatrix definiert (siehe Formate für Posendaten).

Abb. 23 Wichtige Koordinatensysteme und Transformationen für die Kalibrierung einer robotergeführten Kamera: Sie wird mit einer festen relativen Position zu einem benutzerdefinierten Roboter-Koordinatensystem (z.B. Flansch oder Werkzeugmittelpunkt) montiert. Es ist wichtig, dass die Pose \(\mathbf{T}^{\text{ext}}_{\text{robot}}\) des Roboter-Koordinatensystems in Bezug auf ein benutzerdefiniertes externes Referenzkoordinatensystem (ext) während der Kalibrierroutine gemessen werden kann. Das Ergebnis des Kalibriervorgangs ist die gewünschte Kalibriertransformation \(\mathbf{T}^{\text{robot}}_{\text{camera}}\), d.h. die Pose des Kamera-Koordinatensystems im benutzerdefinierten Roboter-Koordinatensystem.
Zusätzliche Benutzereingaben werden benötigt, falls die Bewegung des Roboters so beschränkt ist, dass der Tool Center Point (TCP) nur um eine Achse rotieren kann. Das ist üblicherweise für Roboter mit vier Freiheitsgraden (4DOF) der Fall, welche häufig zur Palettierung eingesetzt werden. In diesem Fall muss der Benutzer angeben, welche Achse des Roboterkoordinatensystems der Rotationsachse des TCP entspricht. Außerdem muss der vorzeichenbehaftete Offset vom TCP zum Kamerakoordinatensystem entlang der TCP-Rotationsachse angegeben werden. Abb. 24 zeigt die Situation.
Für den rc_visard befindet sich der Ursprung des Kamerakoordinatensystems im optischen Zentrum der linken Kamera. Die ungefähre Position wird im Abschnitt Coordinate Frames angegeben.

Abb. 24 Im Fall eines 4DOF-Roboters müssen die TCP-Rotationsachse und der Offset vom TCP zum Kamerakoordinatensystem entlang der TCP-Rotationsachse angegeben werden. Im dargestellten Fall ist der Offset negativ.
- Kalibrierung einer statisch montierten Kamera
In Anwendungsfällen, bei denen die Kamera statisch verglichen zum Roboter montiert wird, muss das Kalibriermuster, wie im Beispiel in Abb. 25 und Abb. 26 angegeben, angebracht werden.
Bemerkung
Für das Modul zur Hand-Auge-Kalibrierung spielt es keine Rolle, wie das Kalibriermuster in Bezug auf das benutzerdefinierte Roboter-Koordinatensystem genau angebracht und positioniert wird. Das bedeutet, dass die relative Positionierung des Kalibriermusters zu diesem Koordinatensystem weder bekannt sein muss, noch für die Kalibrierroutine relevant ist (siehe in Abb. 26).
Warnung
Es ist äußerst wichtig, das Kalibriermuster sicher am Roboter anzubringen, damit sich seine relative Position in Bezug auf das in Schritt 2 der Kalibrierroutine vom Benutzer definierte Roboter-Koordinatensystem nicht verändert.
In diesem Anwendungsfall ist das Ergebnis der Kalibrierung (Schritt 3 der Kalibrierroutine) die Pose \(\mathbf{T}^{\text{ext}}_{\text{camera}}\), die die (zuvor unbekannte) relative Transformation zwischen dem Kamera-Koordinatensystem und dem benutzerdefinierten Roboter-Koordinatensystem beschreibt, sodass Folgendes gilt:
(4)¶\[\mathbf{p}_{\text{ext}} = \mathbf{R}^{\text{ext}}_{\text{camera}} \cdot \mathbf{p}_{\text{camera}} + \mathbf{t}^{\text{ext}}_{\text{camera}} \:,\]wobei \(\mathbf{p}_{\text{ext}} = (x,y,z)^T\) ein 3D-Punkt im externen Referenzkoordinatensystem ext, \(\mathbf{p}_{\text{camera}}\) derselbe Punkt im Kamerakoordinatemsystem camera und \(\mathbf{R}^{\text{ext}}_{\text{camera}}\) sowie \(\mathbf{t}^{\text{ext}}_{\text{camera}}\) die \(3\times 3\) Rotationsmatrix und \(3\times 1\) Translationsvektor der Pose \(\mathbf{T}^{\text{ext}}_{\text{camera}}\) sind. In der Praxis wird die Rotation für das Kalibrierergebnis und die Roboterposen als Eulerwinkel oder Quaternion anstatt einer Rotationsmatrix definiert (siehe Formate für Posendaten).

Abb. 25 Wichtige Koordinatensysteme und Transformationen für die Kalibrierung einer statisch montierten Kamera: Sie wird mit einer festen Position relativ zu einem benutzerdefinierten externen Referenzkoordinatensystem ext (z.B. Weltkoordinatensystem oder Roboter-Montagepunkt) montiert. Es ist wichtig, dass die Pose \(\mathbf{T}^{\text{ext}}_{\text{robot}}\) des benutzerdefinierten Roboter-Koordinatensystems in Bezug auf dieses Koordinatensystem während der Kalibrierroutine gemessen werden kann. Das Ergebnis des Kalibrierprozesses ist die gewünschte Kalibriertransformation \(\mathbf{T}^{\text{ext}}_{\text{camera}}\), d.h. die Pose des Kamera-Koordinatensystems im benutzerdefinierten externen Koordinatensystem ext.

Abb. 26 Alternative Montageoptionen für die Befestigung des Kalibriermusters am Roboter
Zusätzliche Benutzereingaben werden benötigt, falls die Bewegung des Roboters so beschränkt ist, dass der Tool Center Point (TCP) nur um eine Achse rotieren kann. Das ist üblicherweise für Roboter mit vier Freiheitsgraden (4DOF) der Fall, welche häufig zur Palettierung eingesetzt werden. In diesem Fall muss der Benutzer angeben, welche Achse des Roboterkoordinatensystems der Rotationsachse des TCP entspricht. Außerdem muss der vorzeichenbehaftete Offset vom TCP zur sichtbaren Oberfläche des Kalibriermusters entlang der TCP-Rotationsachse angegeben werden. Das Kalibriermuster muss so angebracht werden, dass die TCP-Rotationsachse orthogonal zum Kalibriermuster verläuft. Abb. 27 zeigt die Situation.

Abb. 27 Im Fall eines 4DOF-Roboters müssen die TCP-Rotationsachse und der Offset vom TCP zur sichtbaren Oberfläche des Kalibriermusters entlang der TCP-Rotationsachse angegeben werden. Im dargestellten Fall ist der Offset negativ.
Kalibrierroutine¶
Die allgemeine Hand-Auge-Kalibrierroutine besteht aus den in Abb. 28 angegebenen drei Schritten. Auch der Hand-Auge-Kalibriervorgang der Web GUI greift diese drei Schritte auf.

Abb. 28 Darstellung der drei Schritte der Hand-Auge-Kalibrierroutine
Schritt 1: Einstellung der Parameter¶
Bevor mit der eigentlichen Kalibrierroutine begonnen werden kann, müssen die Parameter für Kalibriermuster und Montage eingestellt werden. Für die REST-API sind die entsprechenden Parameter aufgelistet.
- Web GUI-Beispiel:
Die Web GUI bietet eine Oberfläche, über die sich diese Parameter im ersten Schritt der Kalibrierroutine, wie in Abb. 29 gezeigt, erfassen lassen. Neben den Angaben zur Mustergröße und Kameramontage kann der Benutzer in der Web GUI auch die Kalibrierung von 4DOF-Robotern einstellen. In diesem Fall müssen die Rotationsachse, sowie der Offset vom TCP zum Kamerakoordinatensystem (für Kameras am Roboter) oder zur Oberfläche des Kalibriermusters (für statische Kameras) angegeben werden. Außerdem kann das Format für Posen eingestellt werden. Dieses Format wird im nachfolgenden Schritt 2 des Kalibriervorgangs verwendet, um die Roboterposen zu übertragen. Folgende Formate sind möglich: XYZABC für Positionen und Eulersche Winkel oder XYZ+Quaternion für Positionen samt Quaternionen für die Darstellung von Drehungen. Für die genauen Definitionen siehe Formate für Posendaten.
Bemerkung
Der Parameter Pose in der Web GUI wurde lediglich der Benutzerfreundlichkeit halber hinzugefügt. Für die programmgesteuerte Übertragung von Roboterposen über die REST-API ist die Verwendung des XYZ+Quaternion-Formats zwingend vorgeschrieben.
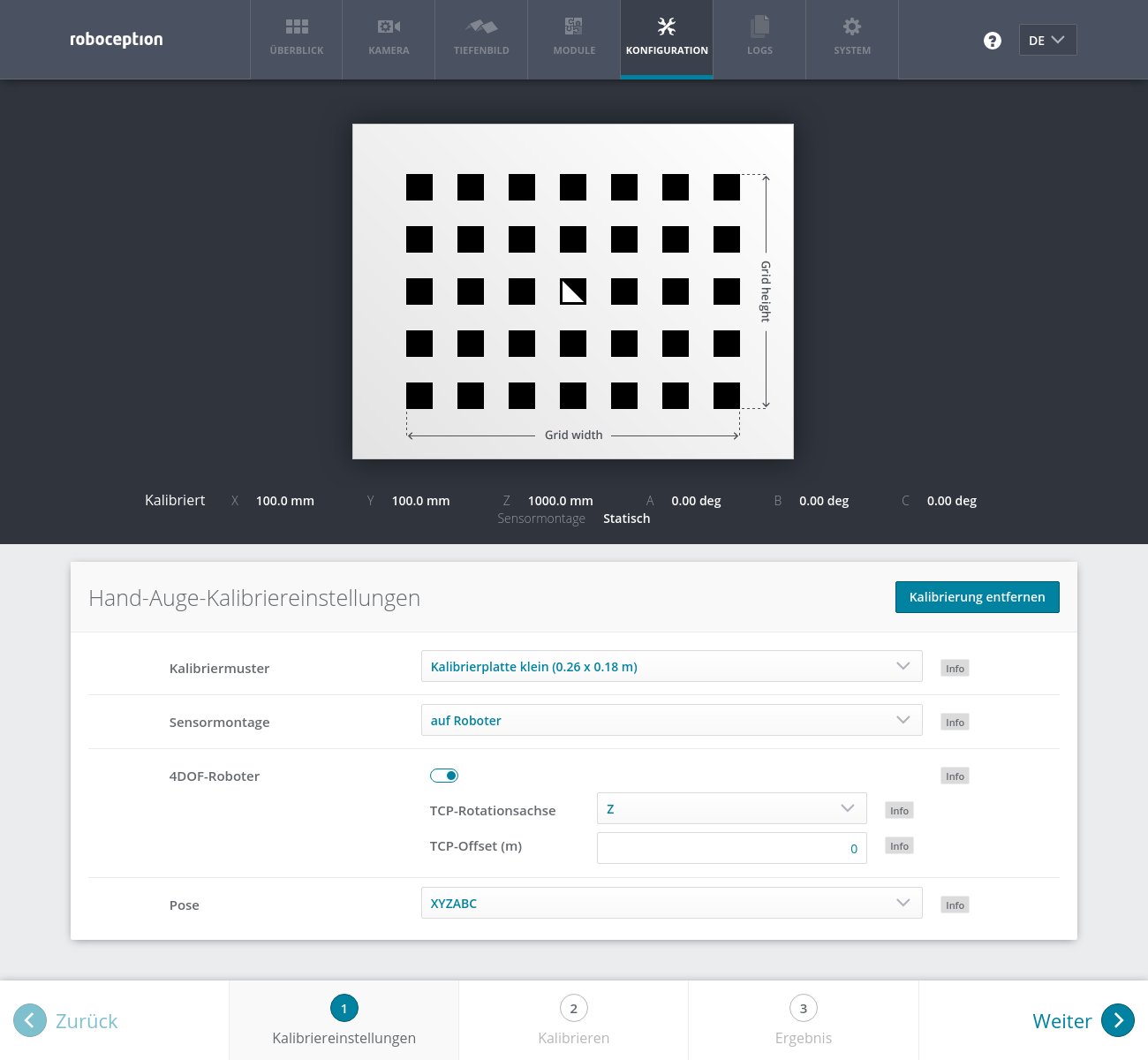
Abb. 29 Erfassung der Parameter zur Hand-Auge-Kalibrierung in der Web GUI des rc_cube
Schritt 2: Auswahl und Übertragung der Kalibrierpositionen des Roboters¶
In diesem Schritt (2a.) definiert der Benutzer verschiedene Kalibrierpositionen, die der Roboter anfahren muss. Dabei ist sicherzustellen, dass das Kalibriermuster bei allen Positionen im linken Kamerabild vollständig sichtbar ist. Zudem müssen die Roboterpositionen sorgsam ausgewählt werden, damit das Kalibriermuster aus unterschiedlichen Perspektiven aufgenommen wird. Abb. 30 zeigt eine schematische Darstellung der empfohlenen acht Ansichten.
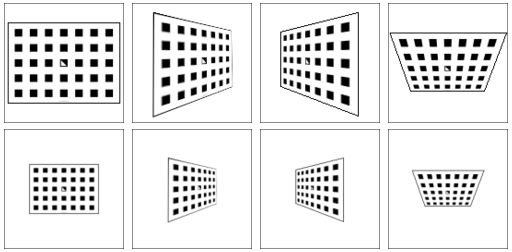
Abb. 30 Empfohlene Ansichten des Kalibriermusters während des Kalibriervorgangs. Im Fall von 4DOF-Robotern müssen andere Ansichten gewählt werden, welche so unterschiedlich wie möglich sein sollten.
Warnung
Die Kalibrierqualität, d.h. die Genauigkeit des berechneten Kalibrierergebnisses, hängt von den Ansichten des Kalibriermusters ab. Je vielfältiger die Perspektiven sind, desto besser gelingt die Kalibrierung. Werden sehr ähnliche Ansichten ausgewählt, d.h. werden die Positionen des Roboters bei den verschiedenen Wiederholungen von Schritt 2a nur leicht variiert, kann dies zu einer ungenauen Schätzung der gewünschten Kalibriertransformation führen.
Nachdem der Roboter die jeweilige Kalibrierposition erreicht hat, muss die entsprechende Pose \(\mathbf{T}^{\text{ext}}_{\text{robot}}\) des benutzerdefinierten Roboter-Koordinatensystems im benutzerdefinierten externen Referenzkoordinatensystem ext an das Modul zur Hand-Auge-Kalibrierung übertragen werden (2b.). Hierfür bietet das Softwaremodul verschiedene Slots, in denen die gemeldeten Posen mit den zugehörigen Bildern der linken Kamera hinterlegt werden können. Alle gefüllten Slots werden dann verwendet, um die gewünschte Kalibriertransformation zwischen dem Kamera-Koordinatensystem und dem benutzerdefinierten Roboter-Koordinatensystem (bei robotergeführten Kameras) bzw. dem benutzerdefinierten externen Referenzkoordinatensystem ext (bei statisch montierten Kameras) zu berechnen.
Bemerkung
Um die Transformation für die Hand-Auge-Kalibrierung erfolgreich zu berechnen, müssen mindestens drei verschiedenen Roboter-Kalibrierposen übertragen und in Slots hinterlegt werden. Um Kalibrierfehler zu verhindern, die durch ungenaue Messungen entstehen können, sind mindestens acht Kalibrierposen empfohlen.
Um diese Posen programmgesteuert zu übertragen, bietet die REST-API den Service set_pose (siehe Services).
- Web GUI-Beispiel:
Nachdem die Kalibriereinstellungen in Schritt 1 abgeschlossen und die Schaltfläche Weiter betätigt wurde, bietet die Web GUI acht verschiedene Slots (Erste Ansicht, Zweite Ansicht, usw.), in die der Benutzer die Posen manuell eintragen kann. Ganz oben wird ein Live-Stream der Kamera angezeigt, um nachverfolgen zu können, ob das Kalibriermuster aktuell erkannt wird oder nicht. Neben jedem Slot wird eine Empfehlung für die Ansicht des Kalibriermusters angezeigt. Der Roboter sollte für jeden Slot so bewegt werden, dass die empfohlene Ansicht erreicht wird.
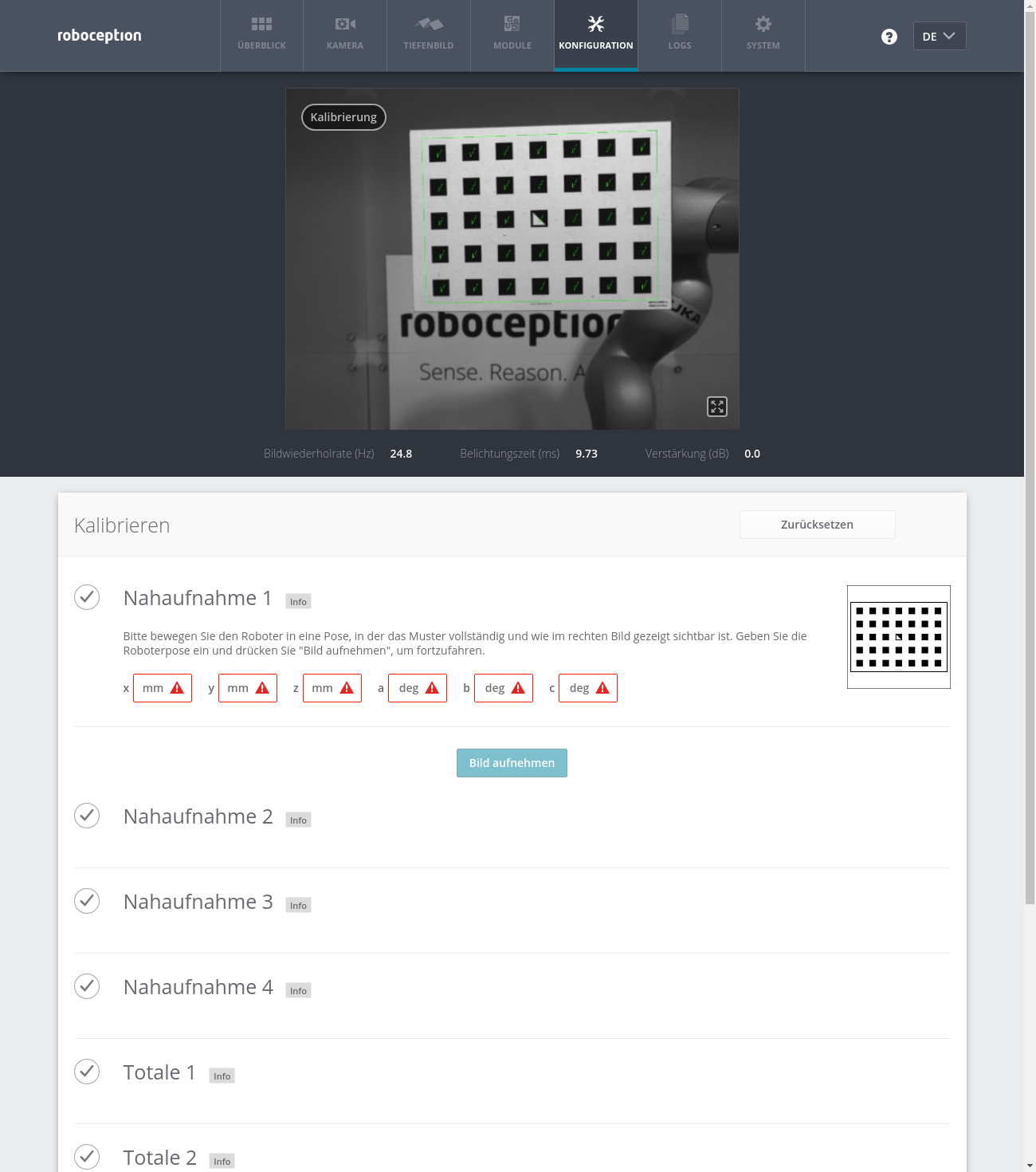
Abb. 31 Erstes Beispielbild für den Hand-Auge-Kalibriervorgang einer statisch montierten Kamera
Sobald das tatsächliche Bild der empfohlenen Ansicht entspricht, sind die Posen des benutzerdefinierten Roboter-Koordinatensystems manuell in den entsprechenden Textfeldern zu erfassen und das Kamerabild mit der Schaltfläche Bild aufnehmen aufzunehmen.
Bemerkung
Der Zugriff auf die Posendaten des Roboters hängt vom Modell des Roboters und seinem Hersteller ab. Möglicherweise lässt sich dies über ein im Lieferumfang des Roboters enthaltenes Teach-in- oder Handheld-Gerät vornehmen.
Warnung
Es ist sorgsam darauf zu achten, dass genaue und korrekte Werte eingegeben werden. Selbst kleinste Ungenauigkeiten oder Tippfehler können dazu führen, dass die Kalibrierung fehlschlägt.
Dieser Vorgang ist insgesamt achtmal zu wiederholen. Vorausgesetzt, die in Abb. 30 dargestellten Empfehlungen zur Aufnahme des Kalibriermusters aus verschiedenen Blickwinkeln jeweils aus der Nähe und aus der Ferne wurden eingehalten, werden die folgenden Kamerabilder mit den jeweiligen Roboterposen an das Softwaremodul zur Hand-Auge-Kalibrierung übertragen:
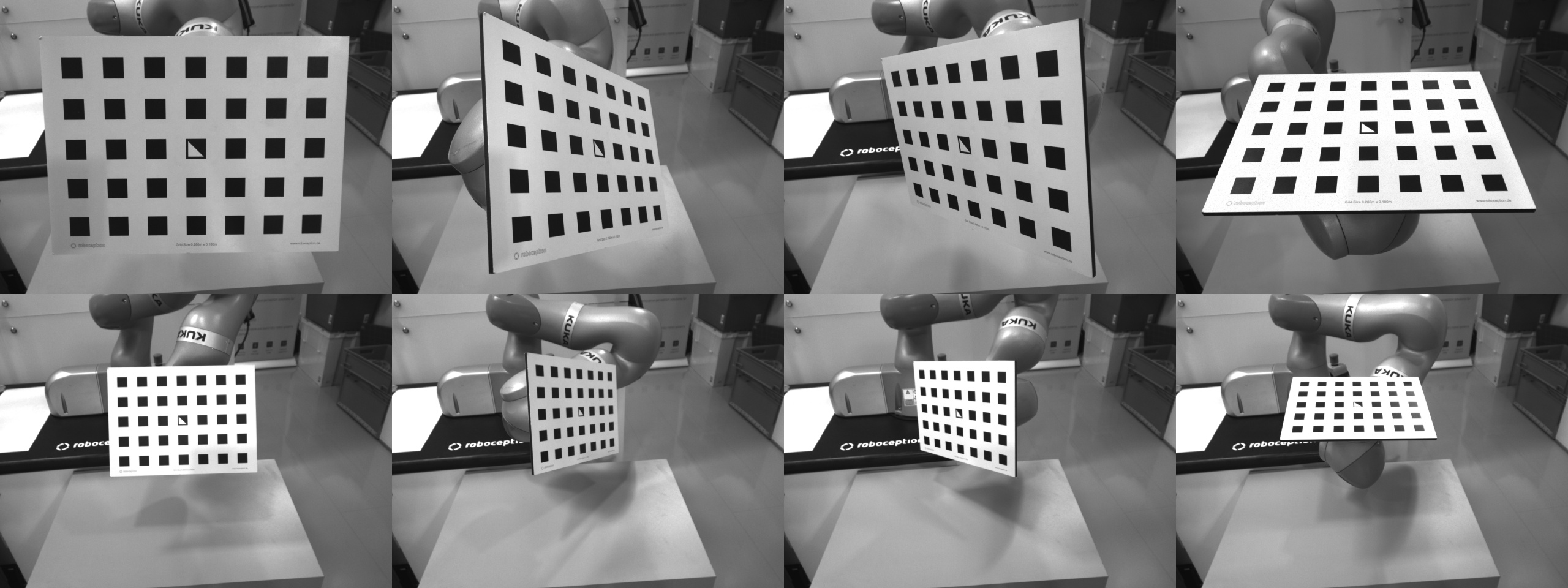
Abb. 32 Beispiel-Kamerabilder für die Hand-Auge-Kalibrierung
Schritt 3: Berechnen und Speichern der Kalibriertransformation¶
Der letzte Schritt in der Hand-Auge-Kalibrierroutine besteht darin, die gewünschte Kalibriertransformation auf Grundlage der erfassten Posen und Kamerabilder zu berechnen. Die REST-API bietet hierfür den Service calibrate (siehe Services). Je nachdem, wie die Kamera montiert ist, wird dabei die Transformation (d.h. die Pose) zwischen dem Kamera-Koordinatensystem und entweder dem benutzerdefinierten Roboter-Koordinatensystem (bei robotergeführten Kameras) oder dem benutzerdefinierten externen Referenzkoordinatensystem ext (bei statisch montierten Kameras) berechnet und ausgegeben (siehe Kameramontage).
Damit der Benutzer die Qualität der resultierenden Kalibriertransformation beurteilen kann, gibt das Modul die translatorischen und rotatorischen Kalibrierfehler an. Diese Werte werden aus der Varianz des Kalibrierergebnisses berechnet.
- Web GUI-Beispiel:
Nachdem die letzte der acht Aufnahmen getätigt wurde, löst die Web GUI automatisch die Berechnung des Kalibrierergebnisses aus. Der Benutzer muss nur auf die Schaltfläche Weiter klicken, um zum Ergebnis zu gelangen. Der Benutzer hat die Möglichkeit die Einstellungen für 4DOF-Roboter anzugeben oder zu korrigieren. Nach jeder Änderung muss die Schaltfläche Neu berechnen angeklickt werden.
Im Beispiel in Abb. 33 ist 4DOF ausgeschaltet und die Kamera statisch montiert. Die resultierende Ausgabe ist die Pose der linken Kamera im externen Koordinatensystem des Roboters. Der angegebene translatorische Fehler ist 0.67 mm, der rotatorische Fehler ist 0.83 Grad.
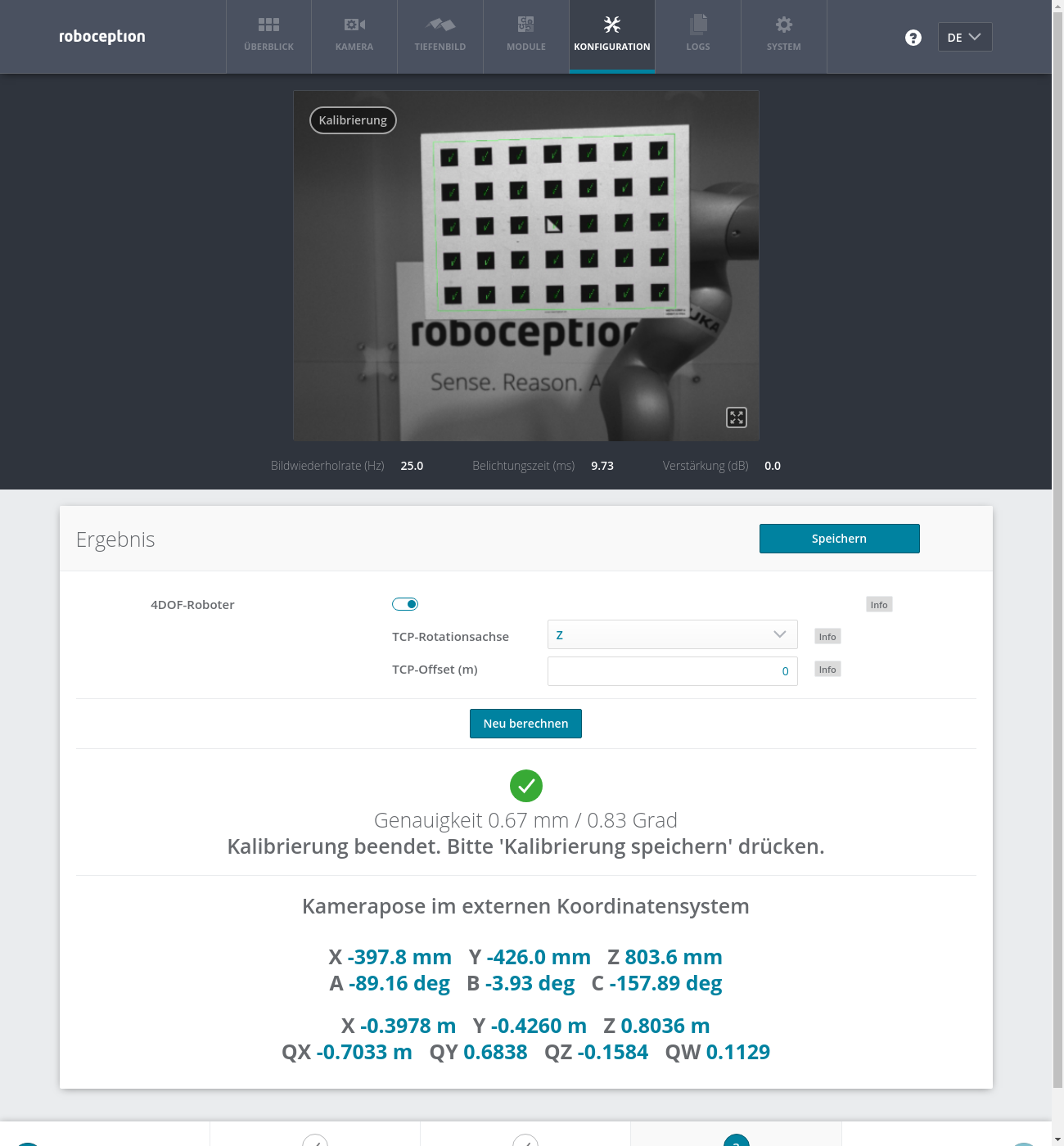
Abb. 33 Ergebnis der Hand-Auge-Kalibrierung, dargestellt in der Web GUI
Parameter¶
Das Modul zur Hand-Auge-Kalibrierung wird in der REST-API als rc_hand_eye_calibration bezeichnet und in der Web GUI auf der Seite Hand-Auge-Kalibrierung unter dem Menüpunkt Konfiguration dargestellt. Der Benutzer kann die Kalibrierparameter entweder dort oder über die REST-API-Schnittstelle ändern.
Übersicht über die Parameter¶
Dieses Softwaremodul bietet folgende Laufzeitparameter:
| Name | Typ | Min. | Max. | Default | Beschreibung |
|---|---|---|---|---|---|
grid_height |
float64 | 0.0 | 10.0 | 0.0 | Höhe des Kalibriermusters in Metern |
grid_width |
float64 | 0.0 | 10.0 | 0.0 | Breite des Kalibriermusters in Metern |
robot_mounted |
bool | false | true | true | Angabe, ob der rc_visard auf einem Roboter montiert ist |
tcp_offset |
float64 | -10.0 | 10.0 | 0.0 | Offset vom TCP entlang tcp_rotation_axis |
tcp_rotation_axis |
int32 | -1 | 2 | -1 | -1 für aus, 0 für x, 1 für y, 2 für z |
Beschreibung der Laufzeitparameter¶
Für die Beschreibungen der Parameter sind die in der Web GUI gewählten Namen der Parameter in Klammern angegeben.
grid_width (Breite des Musters (m))¶
Breite des Kalibriermusters in Metern. Die Breite sollte mit sehr hoher Genauigkeit, vorzugsweise im Submillimeterbereich, angegeben werden.
Über die REST-API kann dieser Parameter wie folgt gesetzt werden.
PUT http://<host>/api/v1/nodes/rc_hand_eye_calibration/parameters?grid_width=<value>
grid_height (Höhe des Musters (m))¶
Höhe des Kalibriermusters in Metern. Die Höhe sollte mit sehr hoher Genauigkeit, vorzugsweise im Submillimeterbereich, angegeben werden.
Über die REST-API kann dieser Parameter wie folgt gesetzt werden.
PUT http://<host>/api/v1/nodes/rc_hand_eye_calibration/parameters?grid_height=<value>
robot_mounted (Kamera Montageart)¶
Ist dieser Parameter auf true gesetzt, dann ist die Kamera an einem Roboter montiert. Ist er auf false gesetzt, ist sie statisch montiert und das Kalibriermuster ist am Roboter angebracht.
Über die REST-API kann dieser Parameter wie folgt gesetzt werden.
PUT http://<host>/api/v1/nodes/rc_hand_eye_calibration/parameters?robot_mounted=<value>
tcp_offset (TCP Offset)¶
Der vorzeichenbehaftete Offset vom TCP zum Kamerakoordinatensystem (für Kameras auf dem Roboter) oder der sichtbaren Oberfläche des Kalibriermusters (für statische Kameras) entlang der TCP-Rotationsachse in Metern. Dies wird benötigt, falls die Roboterbewegung eingeschränkt ist, sodass der TCP nur um eine Achse gedreht werden kann (z.B. bei 4DOF-Robotern).
Über die REST-API kann dieser Parameter wie folgt gesetzt werden.
PUT http://<host>/api/v1/nodes/rc_hand_eye_calibration/parameters?tcp_offset=<value>
tcp_rotation_axis (TCP-Rotationsachse)¶
Die Achse des Roboterkoordinatensystems, um die der Roboter seinen TCP drehen kann. 0 für X-, 1 für Y- und 2 für Z-Achse. Dies wird benötigt falls, die Roboterbewegung eingeschränkt ist, sodass der TCP nur um eine Achse gedreht werden kann (z.B. bei 4DOF-Robotern). -1 bedeutet, dass der Roboter seinen TCP um zwei unabhängige Achsen drehen kann.
tcp_offsetwird in diesem Fall ignoriert.Über die REST-API kann dieser Parameter wie folgt gesetzt werden.
PUT http://<host>/api/v1/nodes/rc_hand_eye_calibration/parameters?tcp_rotation_axis=<value>
(Pose)¶
Der Benutzerfreundlichkeit halber kann der Benutzer die Kalibrierungsdaten in der Web GUI entweder im Format XYZABC oder im Format XYZ+Quaternion angeben (siehe Formate für Posendaten). Wird die Kalibrierung über die REST-API vorgenommen, dann wird das Kalibrierergebnis immer im Format XYZ+Quaternion angegeben.
Services¶
Auf die Services, die die REST-API für die programmgesteuerte Durchführung der Hand-Auge-Kalibrierung und für die Speicherung oder Wiederherstellung der Modulparameter bietet, wird im Folgenden näher eingegangen.
save_parameters¶
Mit diesem Service werden die aktuellen Parametereinstellungen zur Hand-Auge-Kalibrierung auf dem rc_cube gespeichert. Das bedeutet, dass diese Werte selbst nach einem Neustart angewandt werden.
Dieser Service kann wie folgt aufgerufen werden.
PUT http://<host>/api/v1/nodes/rc_hand_eye_calibration/services/save_parametersDieser Service hat keine Argumente.
Die Definition der Response mit jeweiligen Datentypen ist:
{ "name": "save_parameters", "response": { "return_code": { "message": "string", "value": "int16" } } }
reset_defaults¶
Hiermit werden die Werkseinstellungen der Parameter dieses Moduls wieder hergestellt und angewandt („factory reset“). Dies hat keine Auswirkungen auf das Kalibrierergebnis oder auf die während der Kalibrierung gefüllten
Slots. Es werden lediglich Parameter, wie die Maße des Kalibriermusters oder die Montageart des Sensors, zurückgesetzt.Warnung
Durch den Aufruf dieses Services gehen die aktuellen Parametereinstellungen für dieses Modul unwiderruflich verloren.
Dieser Service kann wie folgt aufgerufen werden.
PUT http://<host>/api/v1/nodes/rc_hand_eye_calibration/services/reset_defaultsDieser Service hat keine Argumente.
Die Definition der Response mit jeweiligen Datentypen ist:
{ "name": "reset_defaults", "response": { "return_code": { "message": "string", "value": "int16" } } }
reset_calibration¶
Hiermit werden alle zuvor aufgenommenen Posen mitsamt der zugehörigen Bilder gelöscht. Das letzte hinterlegte Kalibrierergebnis wird neu geladen. Dieser Service kann verwendet werden, um die Hand-Auge-Kalibrierung (neu) zu starten.
Dieser Service kann wie folgt aufgerufen werden.
PUT http://<host>/api/v1/nodes/rc_hand_eye_calibration/services/reset_calibrationDieser Service hat keine Argumente.
Die Definition der Response mit jeweiligen Datentypen ist:
{ "name": "reset_calibration", "response": { "message": "string", "status": "int32", "success": "bool" } }
set_pose¶
Dieser Service setzt die Roboterpose als Kalibrierpose für die Hand-Auge-Kalibrierroutine.
Das
slot-Argument wird verwendet, um den verschiedenen Kalibrierpositionen Ziffern zuzuordnen. Wann immer der Serviceset_poseaufgerufen wird, wird ein Kamerabild aufgezeichnet. Dieser Service schlägt fehl, wenn das Kalibriermuster im aktuellen Bild nicht erkannt werden kann.Dieser Service kann wie folgt aufgerufen werden.
PUT http://<host>/api/v1/nodes/rc_hand_eye_calibration/services/set_poseDie Definition der Request-Argumente mit jeweiligen Datentypen ist:
{ "args": { "pose": { "orientation": { "w": "float64", "x": "float64", "y": "float64", "z": "float64" }, "position": { "x": "float64", "y": "float64", "z": "float64" } }, "slot": "int32" } }Die Definition der Response mit jeweiligen Datentypen ist:
{ "name": "set_pose", "response": { "message": "string", "status": "int32", "success": "bool" } }
Tab. 30 Rückgabewerte des set_pose-Services¶statussuccessBeschreibung 1 truePose erfolgreich gespeichert 3 truePose erfolgreich gespeichert. Es wurden genügend Posen für die Kalibrierung gespeichert, d.h. die Kalibrierung kann durchgeführt werden 4 falsedas Kalibriermuster wurde nicht erkannt, z.B. weil es im Kamerabild nicht vollständig sichtbar ist 8 falsekeine Bilddaten verfügbar 12 falsedie angegebenen Orientierungswerte sind ungültig
calibrate¶
Dieser Service dient dazu, das Ergebnis der Hand-Auge-Kalibrierung auf Grundlage der über den Service
set_posekonfigurierten Roboterposen zu berechnen und auszugeben. Damit die Kalibrierung für andere Module mitget_calibrationverfügbar ist und persistent gespeichert wird, musssave_calibrationaufgerufen werden.Bemerkung
Zur Berechnung der Transformation der Hand-Auge-Kalibrierung werden mindestens drei Roboterposen benötigt (siehe
set_pose). Empfohlen wird jedoch die Verwendung von acht Kalibrierposen.Dieser Service kann wie folgt aufgerufen werden.
PUT http://<host>/api/v1/nodes/rc_hand_eye_calibration/services/calibrateDieser Service hat keine Argumente.
Die Definition der Response mit jeweiligen Datentypen ist:
{ "name": "calibrate", "response": { "error": "float64", "message": "string", "pose": { "orientation": { "w": "float64", "x": "float64", "y": "float64", "z": "float64" }, "position": { "x": "float64", "y": "float64", "z": "float64" } }, "robot_mounted": "bool", "rotation_error_degree": "float64", "status": "int32", "success": "bool", "translation_error_meter": "float64" } }Das Feld
errorgibt den Kalibrierfehler in Pixeln an, der aus dem translatorischen Fehlertranslation_error_meterund dem rotatorischen Fehlerrotation_error_degreeberechnet wird. Dieser Wert wird nur aus Kompatibilitätsgründen mit älteren Versionen angegeben. Die translatorischen und rotatorischen Fehler sollten bevorzugt werden.
Tab. 31 Rückgabewerte des calibrate-Services¶statussuccessBeschreibung 0 trueKalibrierung erfolgreich, das Kalibrierergebnis wurde zurückgegeben. 1 falseNicht genügend Posen gespeichert, um die Kalibrierung durchzuführen 2 falseDas berechnete Ergebnis ist ungültig, bitte prüfen Sie die Eingabewerte. 3 falseDie angegebenen Abmessungen des Kalibriermusters sind ungültig. 4 falseUngenügende Rotation, tcp_offsetandtcp_rotation_axismüssen angegeben werden5 falseGenügend Rotation verfügbar, tcp_rotation_axismuss auf -1 gesetzt werden6 falseDie Posen sind nicht unterschiedlich genug.
set_calibration¶
Hiermit wird die übergebene Transformation als Hand-Auge-Kalibrierung gesetzt. Die Kalibrierung wird im gleichen Format erwartet, in dem sie beim
calibrateundget_calibrationAufruf zurückgegeben wird. Die gegebene Kalibrierung wird auch persistent gespeichert, indem internsave_calibrationaufgerufen wird.Dieser Service kann wie folgt aufgerufen werden.
PUT http://<host>/api/v1/nodes/rc_hand_eye_calibration/services/set_calibrationDie Definition der Request-Argumente mit jeweiligen Datentypen ist:
{ "args": { "pose": { "orientation": { "w": "float64", "x": "float64", "y": "float64", "z": "float64" }, "position": { "x": "float64", "y": "float64", "z": "float64" } }, "robot_mounted": "bool" } }Die Definition der Response mit jeweiligen Datentypen ist:
{ "name": "set_calibration", "response": { "message": "string", "status": "int32", "success": "bool" } }
Tab. 32 Rückgabewerte des set_calibration-Services¶statussuccessBeschreibung 0 trueSetzen der Kalibrierung war erfolgreich 12 falsedie angegebenen Orientierungswerte sind ungültig
save_calibration¶
Hiermit wird das Ergebnis der Hand-Auge-Kalibrierung persistent auf dem rc_cube gespeichert und das vorherige Ergebnis überschrieben. Das gespeicherte Ergebnis lässt sich jederzeit über den Service
get_calibrationabrufen.Dieser Service kann wie folgt aufgerufen werden.
PUT http://<host>/api/v1/nodes/rc_hand_eye_calibration/services/save_calibrationDieser Service hat keine Argumente.
Die Definition der Response mit jeweiligen Datentypen ist:
{ "name": "save_calibration", "response": { "message": "string", "status": "int32", "success": "bool" } }
Tab. 33 Rückgabewerte des save_calibration-Services¶statussuccessBeschreibung 0 truedie Kalibrierung wurde erfolgreich gespeichert 1 falsedie Kalibrierung konnte nicht im Dateisystem gespeichert werden 2 falsedie Kalibrierung ist nicht verfügbar
remove_calibration¶
Dieser Service löscht die persistente Hand-Auge-Kalibrierung auf dem rc_cube. Nach diesem Aufruf gibt der
get_calibrationService zurück, dass keine Hand-Auge-Kalibrierung vorliegt.Dieser Service kann wie folgt aufgerufen werden.
PUT http://<host>/api/v1/nodes/rc_hand_eye_calibration/services/remove_calibrationDieser Service hat keine Argumente.
Die Definition der Response mit jeweiligen Datentypen ist:
{ "name": "remove_calibration", "response": { "message": "string", "status": "int32", "success": "bool" } }
Tab. 34 Rückgabewerte des get_calibration-Services¶statussuccessBeschreibung 0 truepersistente Kalibrierung gelöscht, Gerät nicht mehr kalibriert 1 truekeine persistente Kalibrierung gefunden, Gerät nicht kalibriert 2 falsedie Kalibrierung konnte nicht gelöscht werden
get_calibration¶
Hiermit wird die derzeit auf dem rc_cube gespeicherte Hand-Auge-Kalibrierung abgerufen.
Dieser Service kann wie folgt aufgerufen werden.
PUT http://<host>/api/v1/nodes/rc_hand_eye_calibration/services/get_calibrationDieser Service hat keine Argumente.
Die Definition der Response mit jeweiligen Datentypen ist:
{ "name": "get_calibration", "response": { "error": "float64", "message": "string", "pose": { "orientation": { "w": "float64", "x": "float64", "y": "float64", "z": "float64" }, "position": { "x": "float64", "y": "float64", "z": "float64" } }, "robot_mounted": "bool", "rotation_error_degree": "float64", "status": "int32", "success": "bool", "translation_error_meter": "float64" } }Das Feld
errorgibt den Kalibrierfehler in Pixeln an, der aus dem translatorischen Fehlertranslation_error_meterund dem rotatorischen Fehlerrotation_error_degreeberechnet wird. Dieser Wert wird nur aus Kompatibilitätsgründen mit älteren Versionen angegeben. Die translatorischen und rotatorischen Fehler sollten bevorzugt werden.
Tab. 35 Rückgabewerte des get_calibration-Services¶statussuccessBeschreibung 0 trueeine gültige Kalibrierung wurde zurückgegeben 2 falsedie Kalibrierung ist nicht verfügbar