Überblick¶
Der rc_cube ist ein Gerät zur performanten 3D-Bildverarbeitung, welches die Rechenkapazitäten der Roboception Stereokamera rc_visard erweitert.
Der rc_cube stellt Echtzeit-Kamerabilder und Disparitätsbilder bereit, die auch zur Berechnung von Tiefenbildern und 3D-Punktewolken verwendet werden können. Zudem erstellt er Konfidenz- und Fehlerbilder, mit denen sich die Qualität der Bilderfassung messen lässt. Dank der standardisierten GenICam-Schnittstelle ist er mit allen großen Bildverarbeitungsbibliotheken kompatibel und bietet darüber hinaus eine intuitive, web-basierte Bedienoberfläche an.
Mit optional erhältlichen Softwaremodulen bietet der rc_cube Standardlösungen für Anwendungen in der Objekterkennung oder für robotische Pick-and-Place-Applikationen.

Abb. 1 rc_visard 65 und rc_visard 160
Bemerkung
Sofern nicht anders angegeben, gelten die in diesem Handbuch enthaltenen Informationen für beide Versionen des Roboception-Sensors, d.h. für den rc_visard 65 und den rc_visard 160.
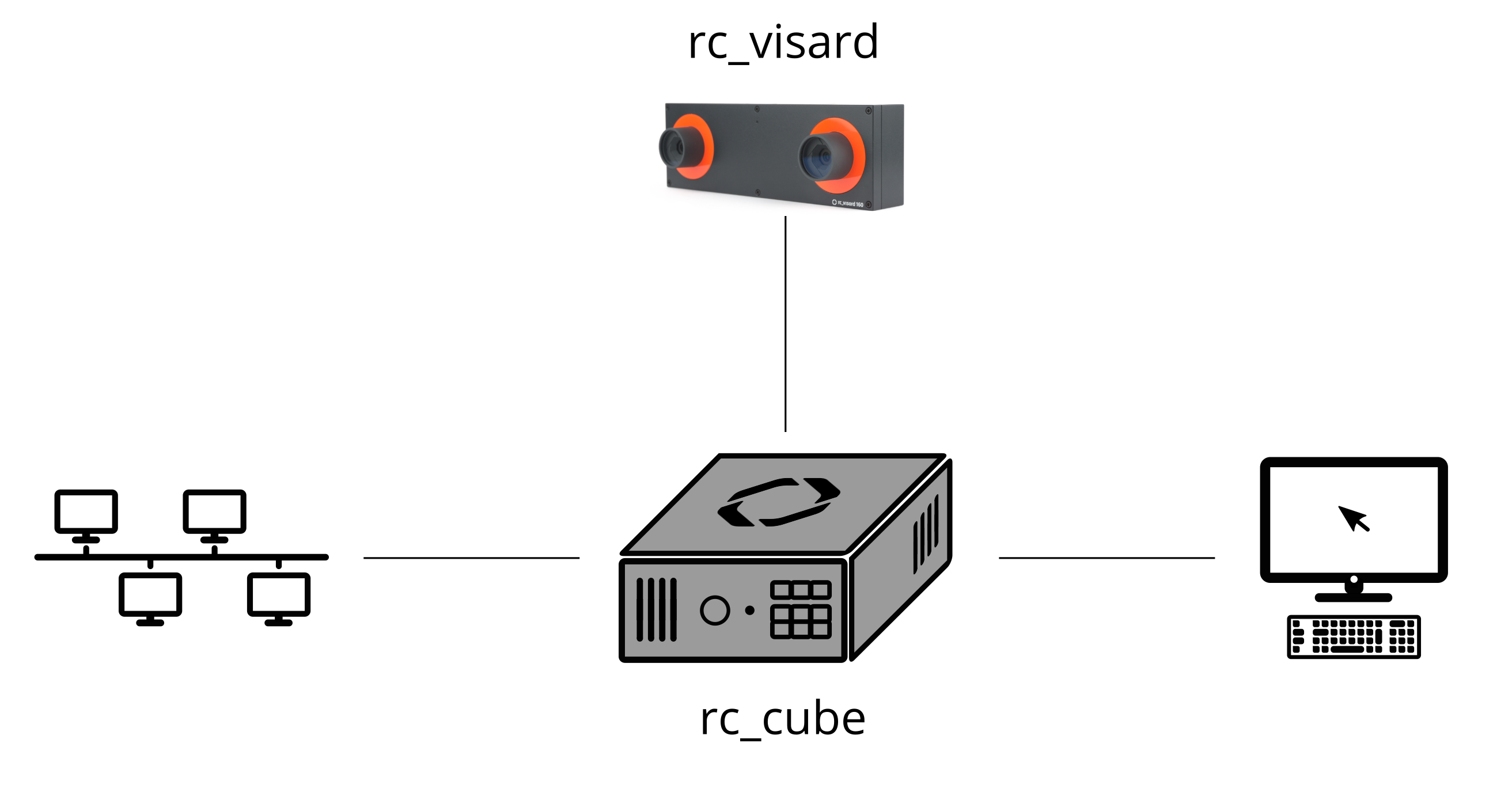
Abb. 2 Der rc_cube
Bemerkung
Das vorliegende Handbuch nutzt das metrische System und verwendet vorrangig die Maßeinheiten Meter und Millimeter. Sofern nicht anders angegeben, sind Abmessungen in technischen Zeichnungen in Millimetern angegeben.